Nota
¡Hola! Bienvenido a la comunidad de entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook. Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 junto a otros apasionados.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprender y compartir: Intercambia consejos y tutoriales para mejorar tus habilidades.
Preestrenos exclusivos: Obtén acceso anticipado a nuevos anuncios de productos y adelantos exclusivos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones especiales durante las festividades.
👉 ¿Listo para explorar y crear con nosotros? ¡Haz clic en [here] y únete hoy mismo!
2. Calibración de PiDog
Introducción
La calibración de tu PiDog es un paso fundamental para garantizar su funcionamiento estable y eficiente. Este proceso ayuda a corregir desequilibrios o imprecisiones causadas por errores de ensamblaje o estructurales. Sigue cuidadosamente los pasos a continuación para asegurarte de que tu PiDog camine de manera fluida y funcione como se espera.
Si el ángulo de desviación es demasiado grande, vuelve a Ajuste de Servos (Importante), ajusta el ángulo del servo a 0° y vuelve a ensamblar PiDog según las instrucciones.
Video de calibración
Para obtener una guía detallada, consulta el video completo de calibración. Este mostrará, de forma visual y paso a paso, cómo calibrar correctamente tu PiDog.
Nota
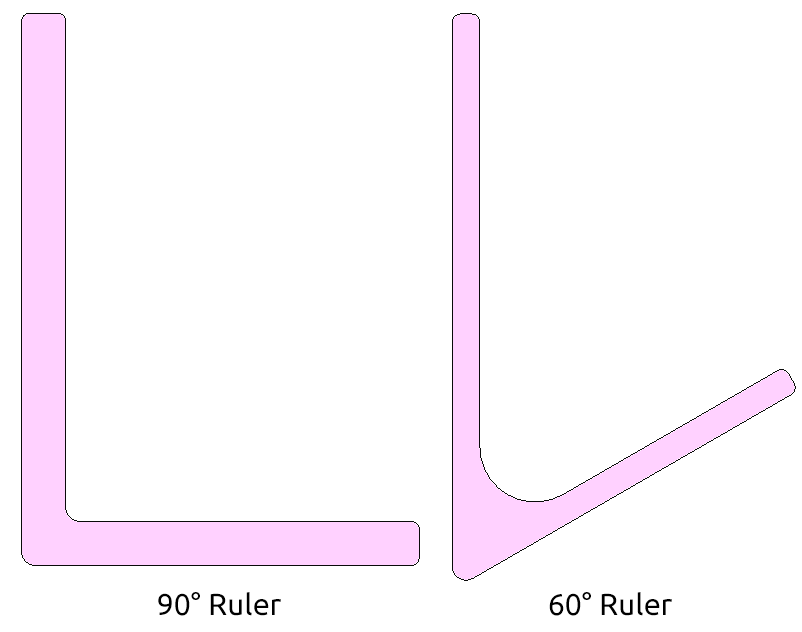
El kit de PiDog incluye una regla de calibración de 90° o de 60°. En el video se utiliza la regla de 90°, pero el proceso con la de 60° es muy similar. También puedes seguir la guía ilustrada paso a paso que aparece a continuación.
Pasos
Sigue estos pasos:
Coloca el PiDog sobre una superficie plana.

Accede al directorio de ejemplos de PiDog y ejecuta el script
0_calibration.py.cd ~/pidog/examples sudo python3 0_calibration.py
Después de ejecutar el script, aparecerá una interfaz interactiva en la terminal. Elige el tipo de regla de calibración que tienes: selecciona la opción 1 para 90° o la opción 2 para 60°.

Una vez hecha la selección, aparecerá la siguiente interfaz de calibración:

Si estás utilizando la regla de 60°
Coloca la regla de calibración (placa acrílica en C) como se muestra, con el borde largo apoyado en la superficie horizontal. Presiona
1en la terminal y usa las teclaswyspara alinear los bordes.
Vuelve a colocar la regla de calibración como se muestra en la figura siguiente. Presiona
2en la terminal y utiliza las teclaswyspara hacer un ajuste fino.
Repite el proceso de calibración para los servos del 3 al 8 para asegurarte de que las cuatro patas de PiDog estén correctamente calibradas.
Si estás utilizando la regla de 90°
Coloca la regla de calibración (placa acrílica en C) como se muestra. Presiona
1en la terminal y utilizawyspara alinear los bordes con la imagen de referencia.
Vuelve a colocar la regla de calibración (placa acrílica en C) como se muestra. Presiona
2en la terminal y vuelve a ajustar conwys.
Repite el procedimiento de calibración para los servos del 3 al 8 para asegurarte de que las cuatro patas de PiDog estén correctamente calibradas.
Finalización de la calibración
Una vez calibrados todos los servos, vuelve a ejecutar los códigos de ejemplo de caminar o de postura de PiDog para verificar que los movimientos sean fluidos.
Si notas alguna desviación, vuelve al programa de calibración para hacer ajustes.
Se recomienda completar este paso inmediatamente después del primer ensamblaje para garantizar un funcionamiento estable.
Truco
Para evitar tener que recalibrar, puedes registrar los ángulos de los servos o exportar el archivo de configuración una vez finalizada la calibración. Esto te permitirá restaurar la configuración rápidamente en el futuro.