21. Using OpenClaw to Control PiDog
What is OpenClaw?
Think of it as an upgraded version of ChatGPT. While traditional chatbots can only talk (generate text), OpenClaw can take action. It understands your natural language instructions and can actually perform operations on your computer, such as running commands, managing files, and calling various tools.
Here are some fantastic application scenarios:
Personal All-around Assistant: Let it help you manage your schedule, set reminders, and track tasks. You just need to tell it in a chat app (like Telegram, WhatsApp), and it will remember and execute.
Automation “Glue”: It can act as a binder for your various services. For example, you can have it monitor a website for price changes. Once a price drop is detected, it can automatically trigger an n8n automation workflow to send you an email notification.
Dedicated Development Assistant: Have it help you manage servers, run scripts, and check logs. You can simply say, “Check the system load for me,” and it can SSH into your server, execute the command, and return the results.
Hardware “Playmate”: This is a very interesting use case. You can have OpenClaw control hardware connected to a Raspberry Pi. For example, a developer used it to control a robotic vacuum cleaner with a mechanical arm, or even had it help analyze racing simulator data and display it on an LED screen. The official Raspberry Pi team even used it to build an automatic photo booth for a wedding, just through conversation, without writing a single line of code!
Important
The Raspberry Pi Zero 2W has only 512MB of RAM, while OpenClaw requires a minimum of 1GB. Therefore, it cannot run properly. A Raspberry Pi 4/5 or higher is recommended.
Quick Start OpenClaw
If you want to experience the power of OpenClaw as quickly as possible, use this method. It will automatically install and launch an interactive setup wizard.
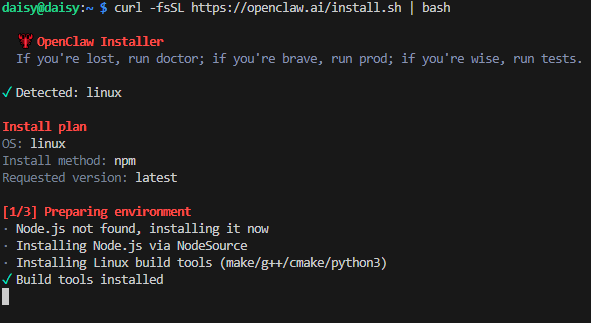
Open the terminal on your Raspberry Pi and run the following command directly. This command downloads the installation script from the official website and executes it:
curl -fsSL https://openclaw.ai/install.sh | bash
Note
Because new versions are updated rapidly, it’s normal if your installation steps differ slightly.
The script will automatically download and install OpenClaw.
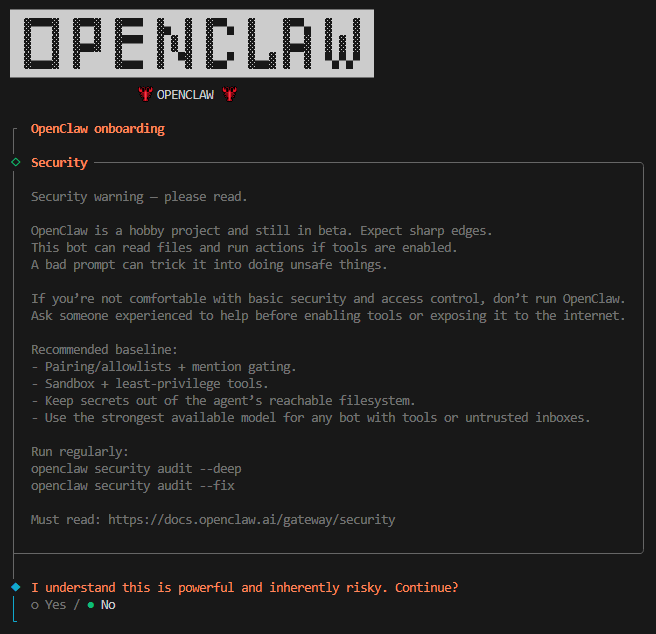
You will then see a security prompt asking if you trust OpenClaw. Once you are sure it is safe and reliable, use the arrow keys to navigate to “Yes” and press Enter.
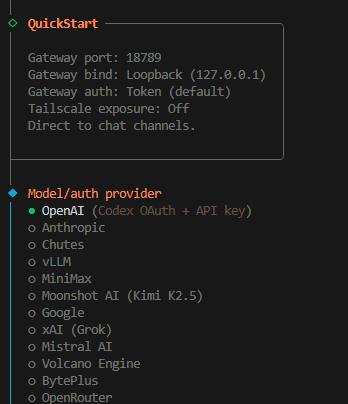
Select Quick Start, and then press Enter.

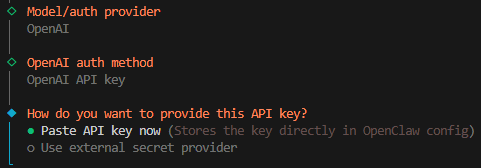
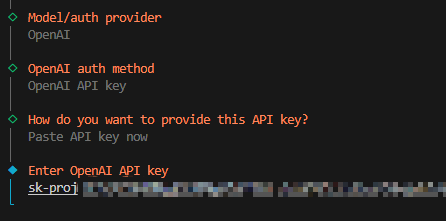
Select your Model, and then press Enter. Here we use OpenAI as an example.
Select OpenAI API Key.
Paste API key now.
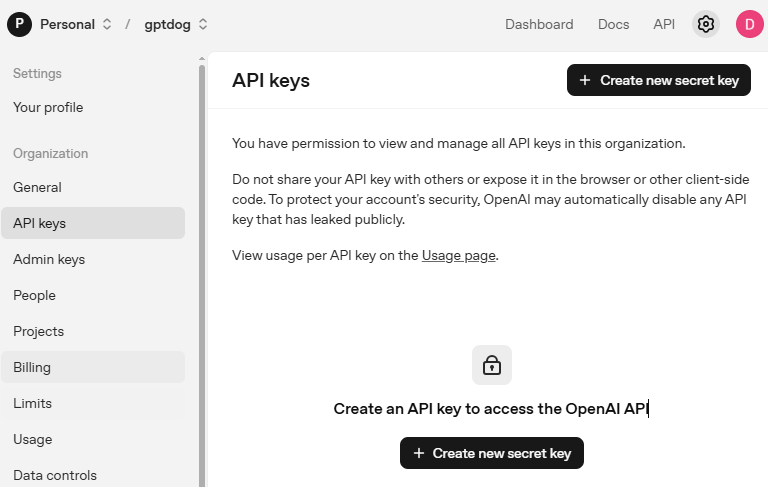
Go to OpenAI Platform and log in. On the API keys page, click Create new secret key.
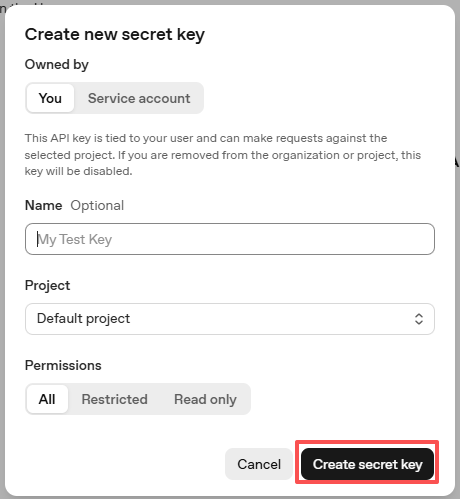
Fill in the details (Owner, Name, Project, and permissions if needed), then click Create secret key.
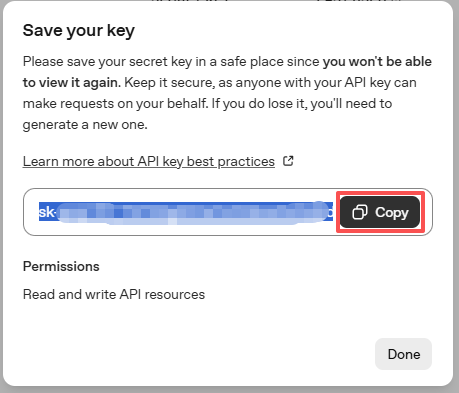
Once the key is created, copy it right away — you won’t be able to see it again. If you lose it, you’ll need to generate a new one.
Paste the key into the OpenCLaw configuration.
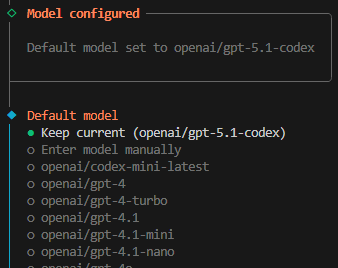
Select the Model you want to use. In this example, we will use Keep current.
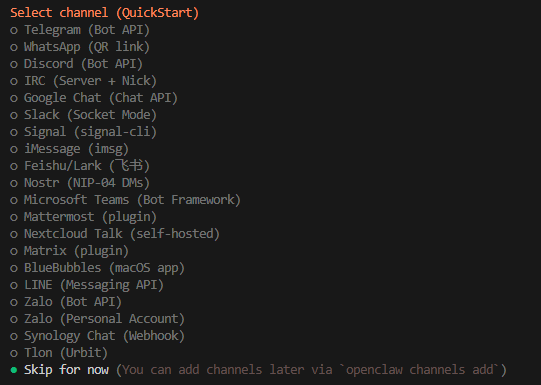
Next is the channel selection. Channels refer to the communication services supported by OpenClaw, such as Telegram, WhatsApp, Discord, and more. Use the down arrow key to select the “Skip for now” option, then press Enter.
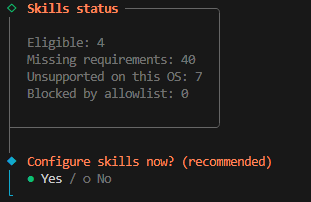
Next, you will be prompted to configure skills immediately. Select “Yes” and press Enter.
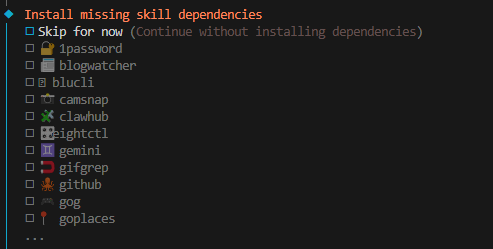
Install the skills you need. In the following example, we select the “Skip for now” option (press the spacebar to select), then press Enter.
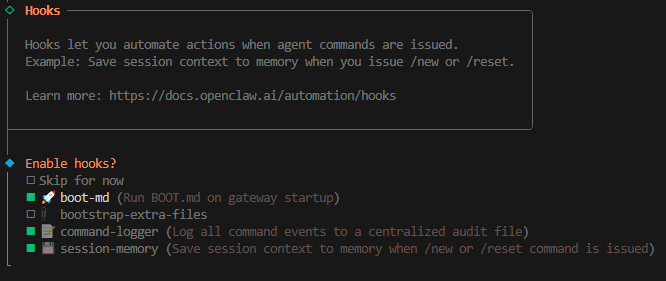
Next are Hooks; we will check “command-logger” and “session-memory”.
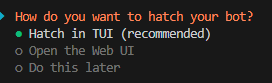
The installation is now complete. You can start OpenClaw by Selecting “Hatch in TUI” and pressing Enter.
Note
You can start OpenClaw by entering the following command:
openclaw tui
And You can press ctrl+c twice to exit the tui interface.
Making OpenClaw Operate the PiDog
What is PiDog Skill?
PiDog Skill is an extension for OpenClaw that allows you to control your SunFounder PiDog V2 robot dog through natural language. Instead of remembering complex command-line parameters, you can simply tell OpenClaw what you want PiDog to do — like “make the dog sit” or “turn the LED lights purple” — and OpenClaw will execute the appropriate commands automatically.
Here are some things you can do with PiDog Skill:
Basic Actions: Make PiDog stand, sit, lie down, wag its tail, bark, walk forward/backward, or turn left/right
Pose Holding: Keep PiDog in a specific pose (like standing) for extended periods
LED Light Control: Change the eye colors with effects like breath, listen, boom, or solid light
Color Customization: Choose from red, green, blue, yellow, purple, pink, cyan, white, orange, or custom hex colors
Prerequisites
Before you can use PiDog Skill with OpenClaw, make sure you have:
PiDog V2 properly assembled and connected to your Raspberry Pi
OpenClaw installed and running
The following directories exist on your system:
~/pidog~/robot-hat~/vilib
You can verify the installation by running:
python3 -c "import pidog"
If this command runs without errors, you’re ready to proceed.
Installing PiDog Skill
Follow these steps to install the PiDog Skill for OpenClaw:
Create the skills directory (if it doesn’t already exist):
mkdir -p ~/.openclaw/workspace/skills/
Copy the PiDog skill files to the OpenClaw skills directory:
cp -r ~/pidog/pidog-control ~/.openclaw/workspace/skills/pidog-control/
Note
Replace
~/pidog-skillwith the actual path where your PiDog skill files are located.Verify the installation by checking the skill files:
ls ~/.openclaw/workspace/skills/pidog-control/scripts/You should see
pidog_ctl.pyandpidog_rgb_ctl.pyin the output.
Testing PiDog Skill
Before using the skill with OpenClaw, it’s recommended to test the basic functionality directly from the terminal.
Step 1: Check PiDog Status
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_ctl.py status
Step 2: Run a Safe Test
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_ctl.py safe-test
Step 3: Test Basic Actions
Make PiDog sit:
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_ctl.py action sit
Make PiDog stand and hold the pose:
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_ctl.py action stand --hold
Make PiDog bark:
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_ctl.py action bark
Step 4: Test LED Lights
Test the boom light effect with purple color:
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_rgb_ctl.py light boom --color purple
Test other light effects:
# Breath effect with red color
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_rgb_ctl.py light breath --color red
# Listen effect with blue color
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_rgb_ctl.py light listen --color blue
# Turn off lights
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_rgb_ctl.py light off
Using PiDog Skill in OpenClaw
Once you’ve verified that PiDog Skill works from the command line, you can start using it within OpenClaw.
Launch OpenClaw TUI:
openclaw tuiSend natural language commands to control PiDog. Here are some examples:
“Make the dog sit”
“Make PiDog stand and stay”
“Wag the dog’s tail”
“Make the dog bark”
“Turn the LED lights purple with boom effect”
“Set the eye lights to breath effect with red color”
“Make PiDog walk forward”
OpenClaw will automatically translate your request into the appropriate command and execute it on PiDog.
Available Actions and Commands
Here is the complete list of supported actions for PiDog Skill:
Action |
Description |
|---|---|
stand |
Make PiDog stand up |
sit |
Make PiDog sit down |
lie |
Make PiDog lie down |
wag-tail |
Wag PiDog’s tail |
bark |
Make barking sound |
forward |
Walk forward |
backward |
Walk backward |
Pose Holding:
Add --hold to any action to keep PiDog in that pose. For example: “stand –hold”
Light Effects:
Effect |
Description |
|---|---|
off |
Turn off all LED lights |
breath |
Gentle breathing/pulsing effect |
listen |
Reactive listening mode |
boom |
Dynamic burst effect (most noticeable) |
solid |
Constant steady light (use boom for better effect) |
Supported Colors:
red, green, blue, yellow, purple, pink, cyan, white, orange, or hex codes like #FF5733
Troubleshooting
OpenClaw Issues
During installation, I get the error
Error: systemctl is-enabled unavailable: Command failed: systemctl --user is-enabled openclaw-gateway.service. What should I do?You can ignore this for now, but you might encounter issues in the next steps. Please refer to them one by one at that time.
When I run
openclaw tui, I get the error-bash: openclaw: command not found. What should I do?Execute the following command:
echo 'export PATH="$HOME/.npm-global/bin:$PATH"' >> ~/.bashrc source ~/.bashrc
You should now be able to start the tui interface with
openclaw tui.
In
openclaw tui, I encounternot connected to gateway — message not sentor the messagegateway disconnected: closed.This is because your OpenClaw Gateway service is not started. Open another terminal and execute the following command to start the OpenClaw Gateway:
openclaw gatewayThen restart
openclaw tui, and you can use it directly.
I want to set the OpenClaw Gateway service to run in the background / start automatically on boot. How do I do that?
Normally, your OpenClaw Gateway service should start automatically on boot. If it doesn’t, you can manually start it with the following command.
Create the
~/.config/systemd/userdirectory:
mkdir -p ~/.config/systemd/user
Create the
openclaw-gateway.servicefile:
cat > ~/.config/systemd/user/openclaw-gateway.service << EOF [Unit] Description=OpenClaw Gateway After=network.target [Service] Type=simple ExecStart=$HOME/.npm-global/bin/openclaw gateway run Restart=on-failure RestartSec=10 Environment="PATH=$HOME/.npm-global/bin:/usr/local/bin:/usr/bin:/bin:/usr/sbin" Environment="NODE_ENV=production" [Install] WantedBy=default.target EOF
Then reload the systemd configuration:
systemctl --user daemon-reload
Start the service:
systemctl --user start openclaw-gateway
At this point, restart
openclaw tui, and you can use it directly.Enable it to start on boot:
systemctl --user enable openclaw-gateway
My OpenClaw can not operate the system, what should I do?
A newly installed OpenClaw may not have permission to operate your Raspberry Pi system by default; it can only chat. We need to manually configure the permissions.
Open the OpenClaw configuration file:
nano ~/.openclaw/openclaw.jsonFind the
toolsoption and change theprofileandexecas shown.
"tools": { "profile": "coding", "exec": { "secrity": "full" } },
Save and exit.
Enter the following command in the terminal to restart the OpenClaw Gateway:
openclaw gateway restart
Now, OpenClaw should have read and write permissions and be able to operate your Raspberry Pi system.
PiDog Issues
PiDog doesn’t respond to commands. What should I do?
First, verify that PiDog is properly connected and powered on. Then test the basic command:
python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_ctl.py status
If this fails, check that the required directories exist:
~/pidog~/robot-hat~/vilib
The
import pidogtest fails.This means the PiDog Python library is not properly installed. Please refer to the PiDog V2 official installation guide to install the necessary libraries.
LED lights don’t work as expected.
If solid light doesn’t show clearly, use the
boomeffect instead — it produces the most noticeable results:python3 ~/.openclaw/workspace/skills/pidog-control/scripts/pidog_rgb_ctl.py light boom --color purple
OpenClaw doesn’t recognize the PiDog skill.
Remind OpenClaw to sync the skills by saying in the TUI: “Please rsync my skills” or restart OpenClaw gateway:
openclaw gateway restart
The bark action doesn’t sound right.
The bark action uses the
single_bark_1sound by default. This is normal behavior for PiDog V2.