2. Get the Motor Rotating¶
Principle of Motor Rotation
As shown in 1. Introduce the Motor, the motors of the Pico 4WD Car are driven by the TC1508S chips. The control pins corresponding to the 4 motors and the direction of rotation are shown below.
Motor |
PinA |
PinB |
Left Front |
GP17 |
GP16 |
Right Front |
GP15 |
GP14 |
Left Rear |
GP13 |
GP12 |
Right Rear |
GP11 |
GP10 |
PinA |
PinB |
Work |
H |
L |
Rotate Clockwise(CW) |
L |
H |
Rotate Counter-clockwise(CCW) |
H |
H |
Stop |
Now let’s start writing the script to see how the motors turn.
Motor Turns Clockwise
Take Right Rear Motor for example, it is controlled by GP11 and GP10. Write
lowfor GP11 andhighfor GP10.import machine pinA = machine.Pin(11, machine.Pin.OUT) pinB = machine.Pin(10, machine.Pin.OUT) pinA.low() pinB.high()
Copy the above code into Thonny or open the
motor_2_cw.pyunder the path ofpico_4wd_car-v2.0\examples\learn_modules.Use a micro USB cable to connect the Pico to your computer and select the “MicroPython (Raspberry Pi Pico) COMxx” interpreter.
Click
 button or simply press
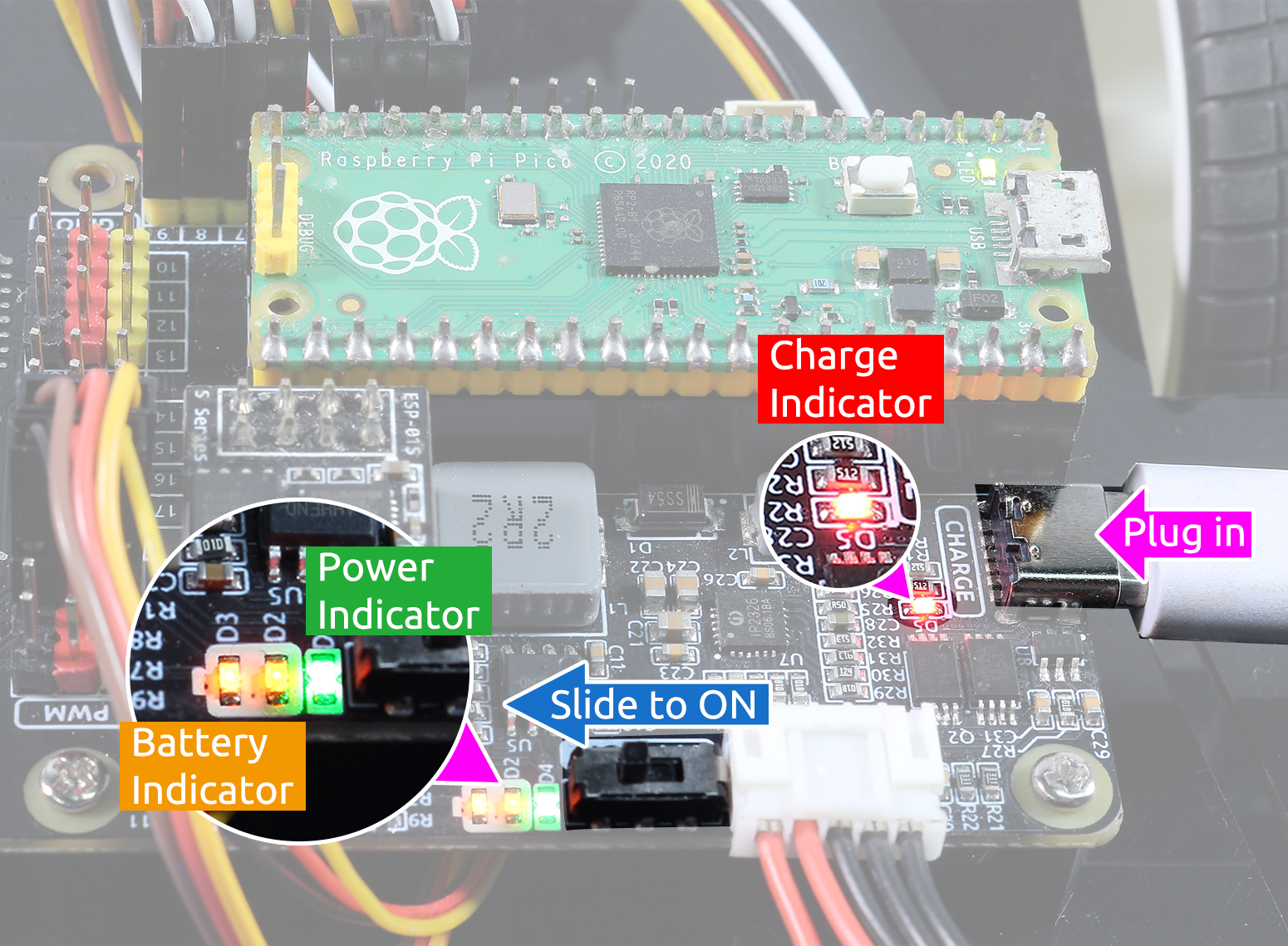
button or simply press F5to run it.Start the Pico 4WD car.
When first used or when the battery cable is unplugged, Pico RDP will activate its over-discharge protection circuitry(Unable to get power from battery).
Therefore, you’ll need to plug in a Type-C cable for about 5 seconds to release the protection status.
At this time look at the battery indicators, if both battery indicators are off, please continue to plug in the Type-C cable to charge the battery.
As you hold the Pico 4WD Car up high, you will be able to see the right rear motor turning clockwise.
Next you can run the following scripts in sequence to see what happens.
Stop the Motor
Write two
highlevels, motor stops.import machine pinA = machine.Pin(11, machine.Pin.OUT) pinB = machine.Pin(10, machine.Pin.OUT) pinA.high() pinB.high()
Motor Turns Counter-clockwise
Reversing the
highandlowlevels, the motor will rotate counterclockwise.import machine pinA = machine.Pin(11, machine.Pin.OUT) pinB = machine.Pin(10, machine.Pin.OUT) pinA.high() pinB.low()
Stop 4 Motors
Stop all motors.
import machine for i in range(10,18): pin = machine.Pin(i, machine.Pin.OUT) pin.high()