Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauche tiefer in die Welt von Raspberry Pi, Arduino und ESP32 ein und tausche dich mit anderen Technikbegeisterten aus.
Warum beitreten?
Expertenunterstützung: Erhalte Hilfe bei technischen Herausforderungen und Fragen nach dem Kauf durch unsere Community und unser Team.
Lernen & Teilen: Tausche Tipps und Anleitungen aus, um deine Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalte frühzeitigen Zugang zu Produktankündigungen und exklusiven Einblicken.
Spezielle Rabatte: Profitiere von exklusiven Vergünstigungen auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nimm an besonderen Aktionen und Verlosungen teil.
👉 Bereit, mit uns zu experimentieren und zu erschaffen? Klicke auf [hier] und tritt noch heute bei!
4.1 Den Joystick verwenden
In dieser Lektion lernen wir, wie man einen Joystick mit dem Raspberry Pi Pico 2 W verbindet, um analoge Werte auszulesen und Tastendrücke zu erkennen. Ein Joystick ist ein weit verbreitetes Eingabegerät, das Bewegungen entlang der X- und Y-Achse erfasst und oft eine zusätzliche Taste (Z-Achse) beinhaltet.
Benötigte Komponenten
Für dieses Projekt benötigen wir folgende Bauteile:
Es ist praktisch, ein Komplettset zu kaufen. Hier ist der Link:
Name |
ENTHALTENE TEILE |
LINK |
|---|---|---|
Pico 2 W Starter Kit |
450+ |
Alternativ kannst du die Komponenten auch einzeln kaufen:
SN |
KOMPONENTE |
MENGE |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro-USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
1 (10KΩ) |
||
6 |
1 |
Funktionsweise des Joysticks
Ein typischer Joystick-Modul besteht aus zwei Potentiometern, die im rechten Winkel zueinander angeordnet sind:
X-Achse-Potentiometer: Misst die Bewegung nach links und rechts.
Y-Achse-Potentiometer: Misst die Bewegung nach oben und unten.
Z-Achse (Schalter): Eine digitale Taste, die beim Drücken aktiviert wird.
Durch das Auslesen der analogen Werte der X- und Y-Achse kann die Position des Joysticks bestimmt werden. Der Z-Achsen-Schalter ermöglicht die Erkennung eines Tastendrucks.
Schaltplan
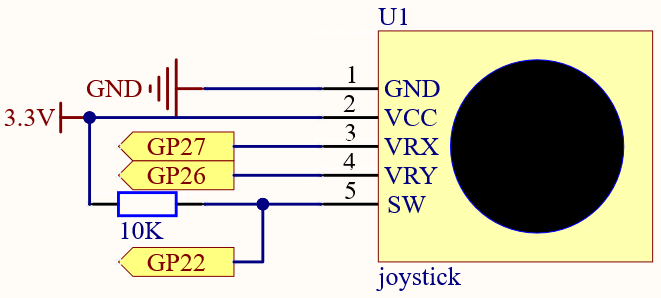
Der SW-Pin ist mit einem 10K-Pull-up-Widerstand verbunden, um einen stabilen High-Pegel sicherzustellen, wenn der Joystick nicht gedrückt wird. Andernfalls wäre der SW-Pin in einem undefinierten Zustand und könnte zufällige Werte liefern.
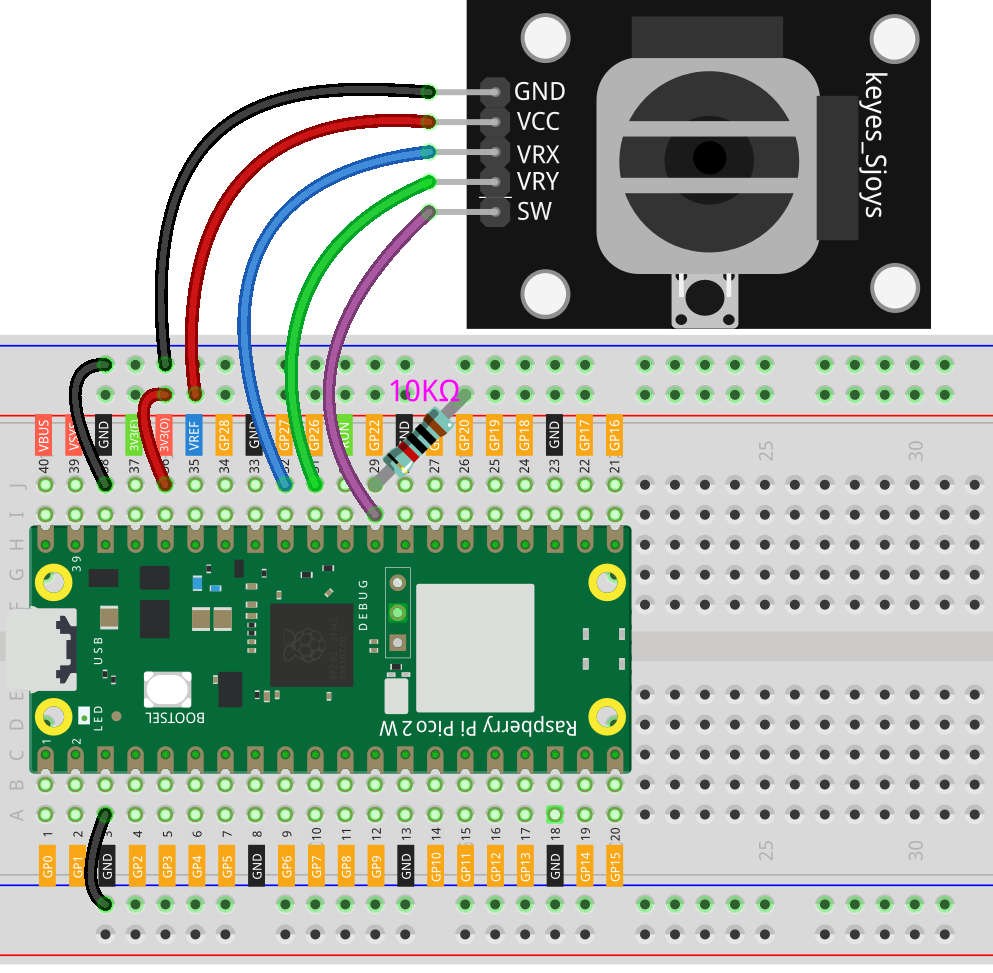
Verdrahtung
Code schreiben
Schreiben wir nun ein MicroPython-Programm, um die X- und Y-Positionen des Joysticks auszulesen und Tastendrücke zu erkennen.
Bemerkung
Öffne die Datei
4.1_toggle_the_joystick.pyaus dem Verzeichnispico-2w-kit-main/micropythonoder kopiere den Code in Thonny und klicke auf „Run“ oder drücke F5.Stelle sicher, dass der richtige Interpreter ausgewählt ist: MicroPython (Raspberry Pi Pico).COMxx.
import machine
import utime
# ADC für die X- und Y-Achsen initialisieren
x_adc = machine.ADC(27) # GP27
y_adc = machine.ADC(26) # GP26
# Digitale Eingabe für den Schalter initialisieren
z_button = machine.Pin(22, machine.Pin.IN, machine.Pin.PULL_UP)
while True:
# Analoge Werte (0-65535) auslesen
x_value = x_adc.read_u16()
y_value = y_adc.read_u16()
# Zustand des Schalters auslesen (0 oder 1)
z_state = z_button.value()
# Werte ausgeben
print("X:", x_value, "Y:", y_value, "Button:", z_state)
# Kleine Verzögerung zur besseren Lesbarkeit
utime.sleep(0.2)
Code-Erklärung
Module importieren:
machine: Zugriff auf die Hardware-Funktionen.utime: Zeitbezogene Funktionen für Verzögerungen.
ADC-Eingänge initialisieren:
Die Pins GP27 und GP26 werden als ADC-Eingänge konfiguriert, um die Joystick-Positionen auszulesen.
x_adc = machine.ADC(27) # X-Achse an GP27 y_adc = machine.ADC(26) # Y-Achse an GP26
Digitale Eingabe initialisieren:
GP22 wird als digitaler Eingang für den Joystick-Schalter konfiguriert.
machine.Pin.PULL_UPsorgt dafür, dass der Pin High (1) ist, wenn der Schalter nicht gedrückt wird, und Low (0), wenn er gedrückt wird.
z_button = machine.Pin(22, machine.Pin.IN, machine.Pin.PULL_UP)
Hauptschleife zur Erfassung der Werte: * Analoge Werte auslesen:
read_u16()liest einen 16-Bit-Wert (0 bis 65535), der den Spannungspegel repräsentiert. * Werte ausgeben: Zeigt die X- und Y-Positionen sowie den Zustand des Tasters in der Konsole an.while True: x_value = x_adc.read_u16() y_value = y_adc.read_u16() z_state = z_button.value() print("X:", x_value, "Y:", y_value, "Button:", z_state) utime.sleep(0.2)
Nach dem Start des Programms öffne das Shell- oder REPL-Fenster in Thonny.
Dort sollten die X-, Y- und Tastenwerte ausgegeben werden.
Bewege den Joystick in verschiedene Richtungen und drücke den Knopf, um die Werteänderungen zu beobachten.
Werte interpretieren
X- und Y-Werte:
Bereich von 0 bis 65535.
Mittlere Position: Etwa 32768.
Ganz links oder oben: Nahe 0.
Ganz rechts oder unten: Nahe 65535.
Tastenstatus:
Nicht gedrückt: 1.
Gedrückt: 0.
Weitere Experimente
Werte normalisieren:
Konvertiere die Rohwerte des ADC in den Bereich -100 bis 100 für eine leichtere Interpretation.
import machine import utime # ADC für X- und Y-Achsen initialisieren x_adc = machine.ADC(27) # GP27 y_adc = machine.ADC(26) # GP26 # Digitale Eingabe für den Schalter initialisieren z_button = machine.Pin(22, machine.Pin.IN, machine.Pin.PULL_UP) # Funktion zur Normalisierung von ADC-Werten in den Bereich -100 bis 100 def normalize(value): return int((value - 32768) / 327.68) while True: # Analoge Werte (0-65535) auslesen x_value = x_adc.read_u16() y_value = y_adc.read_u16() # Zustand des Schalters auslesen (0 oder 1) z_state = z_button.value() # Werte normalisieren auf -100 bis 100 x_normalized = normalize(x_value) y_normalized = normalize(y_value) # Normalisierte Werte ausgeben print("X:", x_normalized, "Y:", y_normalized, "Button:", z_state) # Kleine Verzögerung für bessere Lesbarkeit utime.sleep(0.2)
Eine Ausgangssteuerung implementieren:
Verwende die Joystick-Eingaben zur Steuerung einer LED, eines Servos oder eines Motors. Zum Beispiel kann die Bewegung entlang der X-Achse genutzt werden, um ein Objekt nach links oder rechts zu bewegen.
Einen Game-Controller erstellen:
Kombiniere die Joystick-Eingaben, um ein einfaches Spiel oder eine grafische Darstellung zu steuern.
Fazit
In dieser Lektion hast du gelernt, wie man analoge und digitale Eingaben eines Joysticks mit dem Raspberry Pi Pico 2 W ausliest. Mit diesem Wissen kannst du Joystick-Steuerungen in deine Projekte integrieren und interaktive Anwendungen wie Roboter, Spiele oder Fernbedienungen entwickeln.