Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauche tiefer in die Welt von Raspberry Pi, Arduino und ESP32 ein, zusammen mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Löse Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalte frühen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezielle Rabatte: Genieße exklusive Rabatte auf unsere neuesten Produkte.
Festliche Promotionen und Giveaways: Nimm an Giveaways und Urlaubspromotionen teil.
👉 Bereit, mit uns zu erkunden und zu erschaffen? Klicke auf [hier] und trete heute bei!
6.3 Lesen vom MPU-6050
In dieser Lektion werden wir die Anbindung des MPU-6050 6-Achsen-Bewegungssensors an den Raspberry Pi Pico 2 W erlernen. Der MPU-6050 kombiniert ein 3-Achsen-Gyroskop und einen 3-Achsen-Beschleunigungssensor, die rohe Sensordaten über das I2C-Kommunikationsprotokoll bereitstellen.
Benötigte Komponenten
Für dieses Projekt benötigen wir folgende Komponenten:
Es ist definitiv praktisch, ein gesamtes Kit zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
KAUF-LINK |
|---|---|---|
Pico 2 W Starter Kit |
450+ |
Du kannst sie auch einzeln über die unten stehenden Links kaufen.
SN |
KOMPONENTENBESCHREIBUNG |
MENGE |
KAUF-LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro-USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
1 |
Verständnis des MPU-6050 Sensors
Der MPU-6050 Sensor wird weit verbreitet in Projekten verwendet, die Bewegungstracking und Orientierungserkennung benötigen, wie z.B. bei Drohnen, Robotik und Gaming-Geräten.
Beschleunigungsmesser: Misst Beschleunigungskräfte entlang der X-, Y- und Z-Achsen. Dazu gehört auch die Gravitationsbeschleunigung, was es ermöglicht, die Neigung oder Orientierung des Sensors zu bestimmen.
Gyroskop: Misst die Rotationsgeschwindigkeit um die X-, Y- und Z-Achsen, was Informationen darüber liefert, wie schnell der Sensor sich dreht.
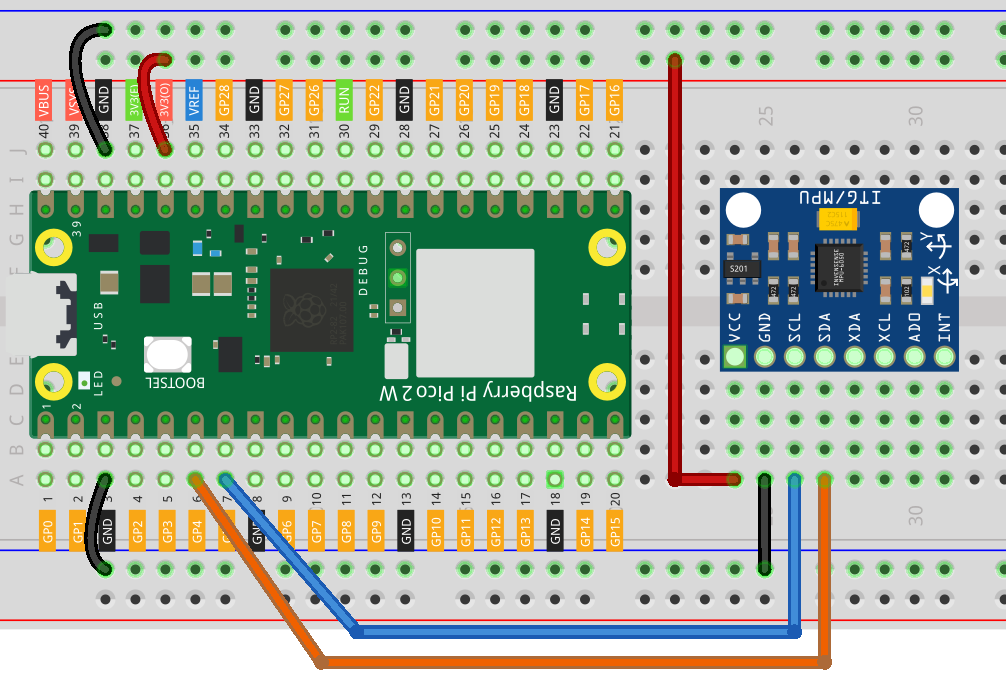
Schaltplan
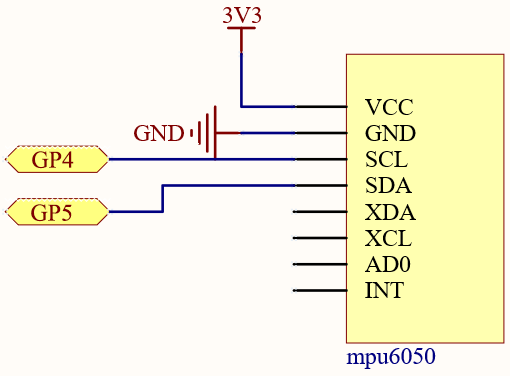
Verdrahtung
Code schreiben
Wir werden ein Programm schreiben, das den MPU-6050 Sensor initialisiert, Beschleunigungs- und Gyroskopdaten liest und die Werte im Seriellen Monitor ausgibt.
Bemerkung
Du kannst die Datei
6.3_6axis_motion_tracking.inoim Pfadpico-2w-kit-main/arduino/6.3_6axis_motion_trackingöffnen.Oder kopiere diesen Code in die Arduino IDE.
Wähle dann das Raspberry Pi Pico Board und den richtigen Port aus, bevor du auf den Upload-Button klickst.
Die
Adafruit MPU6050Bibliothek wird hier verwendet, du kannst sie aus dem Library Manager installieren.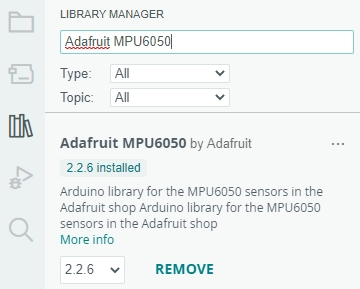
#include <Adafruit_MPU6050.h>
#include <Wire.h>
// Erstelle ein MPU6050 Objekt
Adafruit_MPU6050 mpu;
void setup(void) {
// Initialisiere die serielle Kommunikation
Serial.begin(115200);
Serial.println("Adafruit MPU6050 test!");
// Versuche den MPU6050 zu initialisieren
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 gefunden!");
// Stelle den Beschleunigungsmesserbereich ein
mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
Serial.print("Accelerometer range set to: ");
switch (mpu.getAccelerometerRange()) {
case MPU6050_RANGE_2_G:
Serial.println("+-2G");
break;
case MPU6050_RANGE_4_G:
Serial.println("+-4G");
break;
case MPU6050_RANGE_8_G:
Serial.println("+-8G");
break;
case MPU6050_RANGE_16_G:
Serial.println("+-16G");
break;
}
// Stelle den Gyroskopbereich ein
mpu.setGyroRange(MPU6050_RANGE_500_DEG);
Serial.print("Gyro range set to: ");
switch (mpu.getGyroRange()) {
case MPU6050_RANGE_250_DEG:
Serial.println("+-250 deg/s");
break;
case MPU6050_RANGE_500_DEG:
Serial.println("+-500 deg/s");
break;
case MPU6050_RANGE_1000_DEG:
Serial.println("+-1000 deg/s");
break;
case MPU6050_RANGE_2000_DEG:
Serial.println("+-2000 deg/s");
break;
}
// Stelle die Filterbandbreite ein
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
Serial.print("Filter bandwidth set to: ");
switch (mpu.getFilterBandwidth()) {
case MPU6050_BAND_260_HZ:
Serial.println("260 Hz");
break;
case MPU6050_BAND_184_HZ:
Serial.println("184 Hz");
break;
case MPU6050_BAND_94_HZ:
Serial.println("94 Hz");
break;
case MPU6050_BAND_44_HZ:
Serial.println("44 Hz");
break;
case MPU6050_BAND_21_HZ:
Serial.println("21 Hz");
break;
case MPU6050_BAND_10_HZ:
Serial.println("10 Hz");
break;
case MPU6050_BAND_5_HZ:
Serial.println("5 Hz");
break;
}
Serial.println("");
delay(100);
}
void loop() {
// Hole neue Sensorevents mit den Messwerten
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
// Drucke Beschleunigungswerte
Serial.print("Acceleration X: ");
Serial.print(a.acceleration.x);
Serial.print(" m/s^2, Y: ");
Serial.print(a.acceleration.y);
Serial.print(" m/s^2, Z: ");
Serial.print(a.acceleration.z);
Serial.println(" m/s^2");
// Print gyroscope values
Serial.print("Rotation X: ");
Serial.print(g.gyro.x);
Serial.print(" rad/s, Y: ");
Serial.print(g.gyro.y);
Serial.print(" rad/s, Z: ");
Serial.print(g.gyro.z);
Serial.println(" rad/s");
delay(500); // Passe die Verzögerung bei Bedarf an
}
Nach dem Hochladen des Codes sollte der Serielle Monitor kontinuierlich die Beschleunigungs- und Rotationswerte anzeigen.
Adafruit MPU6050 test!
MPU6050 Found!
Accelerometer range set to: +-8G
Gyro range set to: +-500 deg/s
Filter bandwidth set to: 21 Hz
Acceleration X: 0.00 m/s^2, Y: 0.00 m/s^2, Z: 9.81 m/s^2
Rotation X: 0.02 rad/s, Y: -0.01 rad/s, Z: 0.00 rad/s
Acceleration X: 0.10 m/s^2, Y: 0.05 m/s^2, Z: 9.76 m/s^2
Rotation X: 0.15 rad/s, Y: -0.05 rad/s, Z: 0.02 rad/s
Bewege oder drehe das MPU-6050 Sensor-Modul vorsichtig. Beobachte die Veränderungen in den Beschleunigungs- und Rotationswerten, die den Bewegungen entsprechen.
Verständnis des Codes
Einbinden der Bibliotheken und Definition der Konstanten:
Adafruit_MPU6050.h: Bindet die MPU6050-Bibliothek ein, um die Schnittstelle zu erleichtern.Wire.h: Bindet die I2C-Kommunikationsbibliothek ein.mpu: Erstellt ein MPU6050-Objekt, um mit dem Sensor zu interagieren.
Setup-Funktion:
MPU6050-Initialisierung:
Versucht, den MPU6050-Sensor zu initialisieren. Wenn dies nicht erfolgreich ist, wird eine Fehlermeldung ausgegeben und das Programm angehalten.
Serial.println("Adafruit MPU6050 test!"); // Versuche den MPU6050 zu initialisieren if (!mpu.begin()) { Serial.println("Failed to find MPU6050 chip"); while (1) { delay(10); } } Serial.println("MPU6050 Found!");
Beschleunigungsmesserbereich:
Stellt den Beschleunigungsmesserbereich auf ±8G ein und gibt den aktuellen Bereich aus.
mpu.setAccelerometerRange(MPU6050_RANGE_8_G); Serial.print("Accelerometer range set to: "); switch (mpu.getAccelerometerRange()) { case MPU6050_RANGE_2_G: Serial.println("+-2G"); break; ... case MPU6050_RANGE_16_G: Serial.println("+-16G"); break; }
Gyroskopbereich:
Stellt den Gyroskopbereich auf ±500 Grad pro Sekunde ein und gibt den aktuellen Bereich aus.
mpu.setGyroRange(MPU6050_RANGE_500_DEG); Serial.print("Gyro range set to: "); switch (mpu.getGyroRange()) { case MPU6050_RANGE_250_DEG: Serial.println("+-250 deg/s"); break; ... case MPU6050_RANGE_2000_DEG: Serial.println("+-2000 deg/s"); break; }
Einstellung der Filterbandbreite:
Konfiguriert die Filterbandbreite auf 21 Hz, um Rauschen zu reduzieren, und gibt die aktuelle Einstellung aus.
mpu.setFilterBandwidth(MPU6050_BAND_21_HZ); Serial.print("Filter bandwidth set to: "); switch (mpu.getFilterBandwidth()) { case MPU6050_BAND_260_HZ: Serial.println("260 Hz"); break; ... case MPU6050_BAND_5_HZ: Serial.println("5 Hz"); break; }
Loop-Funktion:
Auslesen der Sensordaten:
sensors_event_t a, g, temp;: Erstellt Ereignisobjekte, um Beschleunigungs-, Gyroskop- und Temperaturdaten zu speichern.mpu.getEvent(&a, &g, &temp);: Ruft die neuesten Sensordaten ab.
sensors_event_t a, g, temp; mpu.getEvent(&a, &g, &temp);
Ausgabe der Sensordaten:
Beschleunigung: Gibt Beschleunigungswerte entlang der X-, Y- und Z-Achsen in Metern pro Sekunde im Quadrat (m/s²) aus.
Rotation: Gibt Gyroskopwerte (Rotationsgeschwindigkeit) um die X-, Y- und Z-Achsen in Radianten pro Sekunde (rad/s) aus.
// Drucke Beschleunigungswerte Serial.print("Acceleration X: "); Serial.print(a.acceleration.x); ... Serial.print(g.gyro.y); Serial.print(" rad/s, Z: "); Serial.print(g.gyro.z); Serial.println(" rad/s");
Fehlerbehebung
Keine Anzeige von Messwerten:
Überprüfe alle Verdrahtungsverbindungen, insbesondere die I2C-Leitungen (SCL und SDA).
Stelle sicher, dass der MPU6050-Sensor mit Strom versorgt wird (VCC- und GND-Verbindungen).
Überprüfe, ob die richtigen GPIO-Pins im Code definiert sind.
Falsche Messwerte:
Stelle sicher, dass der MPU6050-Sensor richtig im Steckbrett sitzt.
Überprüfe, ob die Bereichs- und Filtereinstellungen des Sensors der gewünschten Anwendung entsprechen.
Überprüfe auf lose Verbindungen oder Kurzschlüsse in der Verdrahtung.
Sensorinterferenzen:
Vermeide es, den Sensor in der Nähe anderer elektronischer Geräte zu platzieren, die Störungen verursachen könnten.
Stelle sicher, dass keine physischen Hindernisse die Bewegung des Sensors blockieren.
Weitere Erkundungen
Kombination mit anderen Sensoren:
Integriere den MPU6050 mit GPS-Modulen, Magnetometern oder anderen Sensoren, um umfassende Trackingsysteme zu erstellen.
Bau eines bewegungsbasierten Spielcontrollers:
Verwende den MPU6050, um Bewegungen und Orientierungen zu erkennen, was die Erstellung von bewegungsgesteuerten Spielgeräten ermöglicht.
Bau eines selbstbalancierenden Roboters:
Nutze die Beschleunigungs- und Gyroskopdaten, um Balance und Stabilität in Roboteranwendungen zu gewährleisten.
Implementierung von Sensorfusionsalgorithmen:
Kombiniere Beschleunigungs- und Gyroskopdaten, um Orientierungswinkel mithilfe von Algorithmen wie dem Kalman-Filter oder dem Komplementärfilter zu berechnen.
Fazit
In dieser Lektion hast du gelernt, wie man den MPU6050 6-Achsen-Bewegungssensor mit dem Raspberry Pi Pico anbindet. Durch die Nutzung der Adafruit MPU6050-Bibliothek kannst du einfach Beschleunigungs- und Gyroskopdaten abrufen und interpretieren, was eine Vielzahl von Bewegungs- und Orientierungsanwendungen ermöglicht. Die optionale LED-Anzeige bietet eine einfache Möglichkeit, visuelles Feedback basierend auf den Sensordaten zu geben, was die Interaktivität deiner Projekte erhöht.