Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
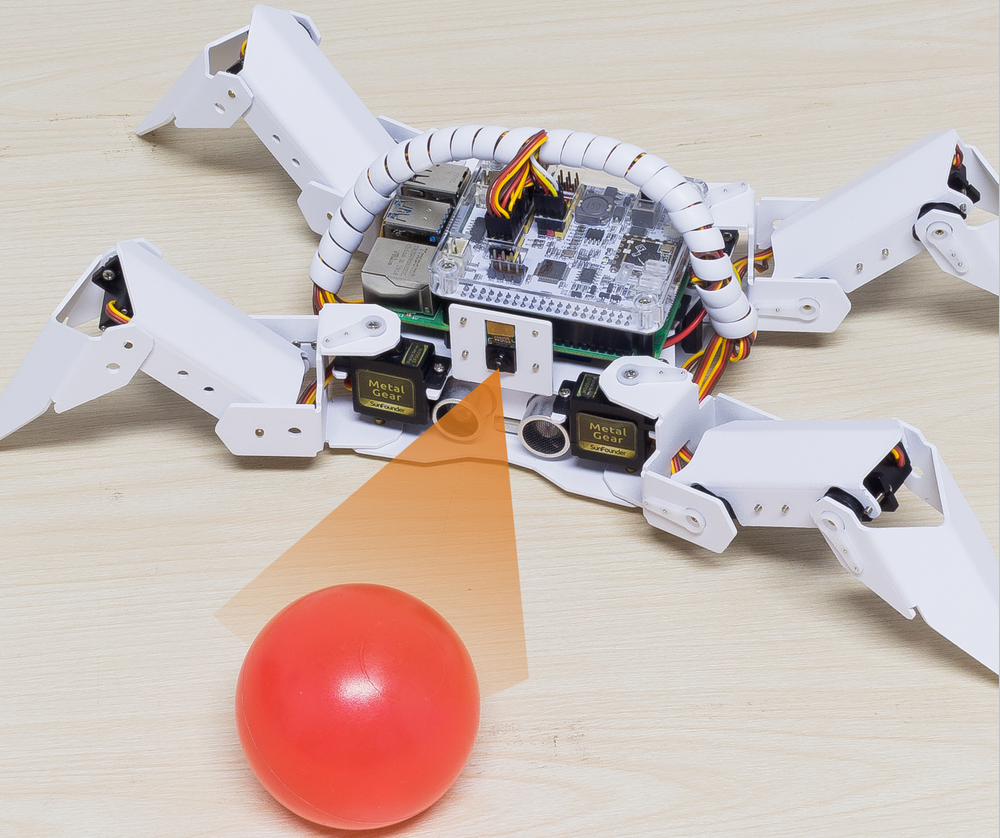
Bull Fight¶
Make PiCrawler an angry bull! Use its camera to track and rush the red cloth!
Run the Code
cd /home/pi/picrawler/examples
sudo python3 bull_fight.py
View the Image
After the code runs, the terminal will display the following prompt:
No desktop !
* Serving Flask app "vilib.vilib" (lazy loading)
* Environment: production
WARNING: Do not use the development server in a production environment.
Use a production WSGI server instead.
* Debug mode: off
* Running on http://0.0.0.0:9000/ (Press CTRL+C to quit)
Then you can enter http://<your IP>:9000/mjpg in the browser to view the video screen. such as: https://192.168.18.113:9000/mjpg
Code
Note
You can Modify/Reset/Copy/Run/Stop the code below. But before that, you need to go to source code path like picrawler\examples. After modifying the code, you can run it directly to see the effect.
from picrawler import Picrawler
from time import sleep
from robot_hat import Music
from vilib import Vilib
crawler = Picrawler([10,11,12,4,5,6,1,2,3,7,8,9])
#crawler.set_offset([0,0,0,0,0,0,0,0,0,0,0,0])
music = Music()
def main():
Vilib.camera_start()
Vilib.display()
Vilib.color_detect("red")
speed = 100
while True:
if Vilib.detect_obj_parameter['color_n']!=0:
coordinate_x = Vilib.detect_obj_parameter['color_x']
music.sound_effect_threading('./sounds/talk1.wav')
if coordinate_x < 100:
crawler.do_action('turn left',1,speed)
sleep(0.05)
elif coordinate_x > 220:
crawler.do_action('turn right',1,speed)
sleep(0.05)
else :
crawler.do_action('forward',2,speed)
sleep(0.05)
else :
crawler.do_step('stand',speed)
sleep(0.05)
if __name__ == "__main__":
main()
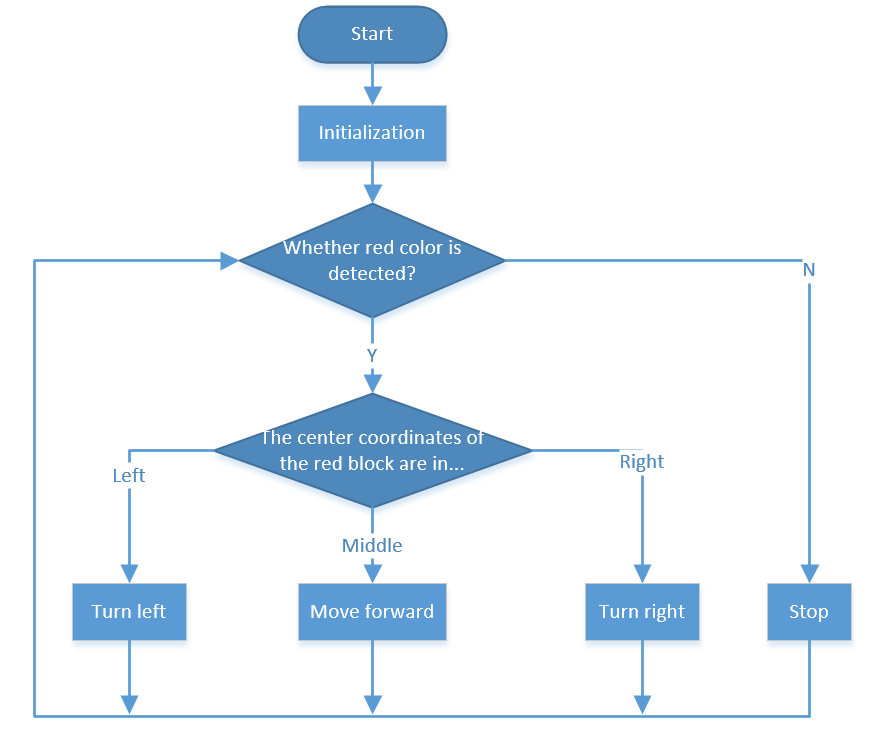
How it works?
In general, this project combines the knowledge points of Move, Computer Vision and Sound Effect.
Its flow is shown in the figure below: