Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
GalaxyRVR Shield
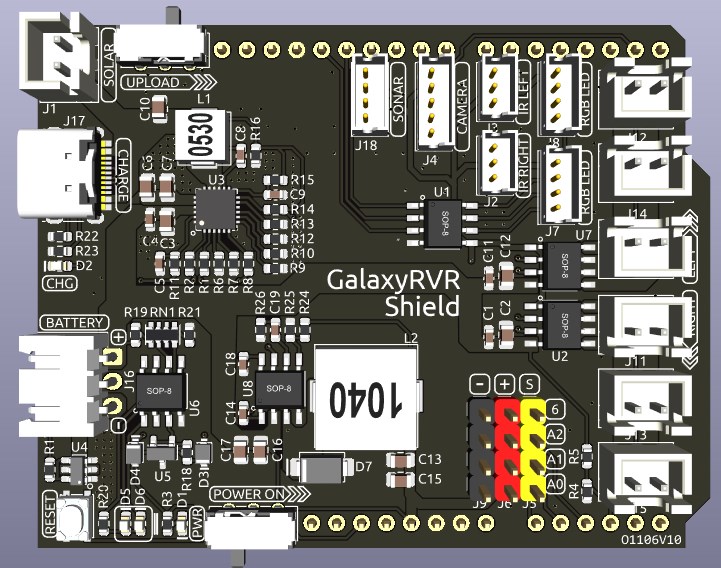
Dies ist ein All-in-One-Erweiterungsboard, das von SunFounder für Arduino entwickelt wurde und verschiedene Modulanschlüsse enthält, wie Motor, RGB-Streifen, Hindernisvermeidung, Graustufen, ESP32 CAM und Ultraschallmodul.
Dieses Erweiterungsboard verfügt außerdem über einen integrierten Ladekreislauf, der den Akku mit PH2.0-3P Schnittstelle aufladen kann, und die geschätzte Ladezeit beträgt 130 Minuten.
Pinbelegung
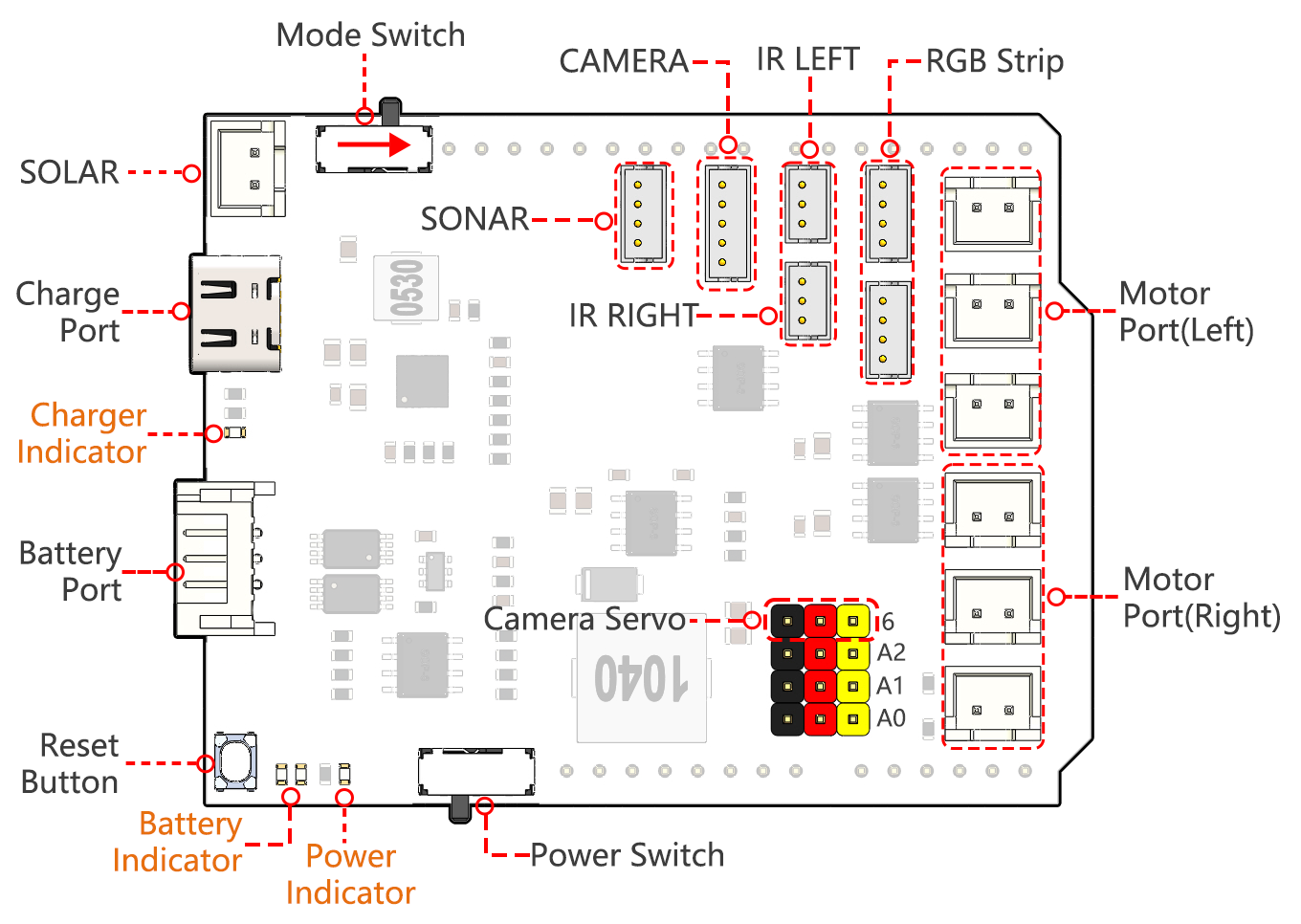
- Charge Port
Nach dem Einstecken in den 5V/2A USB-C-Port kann es zum Aufladen des Akkus für 130 Minuten verwendet werden.
- Battery Port:
6.6V~8.4V PH2.0-3P-Stromversorgungseingang.
Versorgt das GalaxyRVR Shield und das Arduino-Board gleichzeitig mit Strom.
- Reset Button
Drücken Sie diese Taste, um das Programm auf dem Arduino-Board zurückzusetzen.
- Indicators
Charge Indicator: Leuchtet rot, wenn das Shield über den USB-C-Port aufgeladen wird.
Power Indicator: Leuchtet grün, wenn der Netzschalter in der Position „ON“ ist.
Battery Indicator: Zwei orangefarbene Anzeigen repräsentieren verschiedene Batteriestände. Sie blinken während des Ladens und gehen aus, wenn die Batterie aufgeladen werden muss.
- Camera Servo
Das Servo an der Kamera ist hier angeschlossen.
Das braune Kabel wird mit „-“ verbunden, das rote Kabel wird mit „+“ verbunden und das gelbe Kabel wird mit Pin 6 verbunden.
- Netzschalter
Auf ON schieben, um das GalaxyRVR einzuschalten.
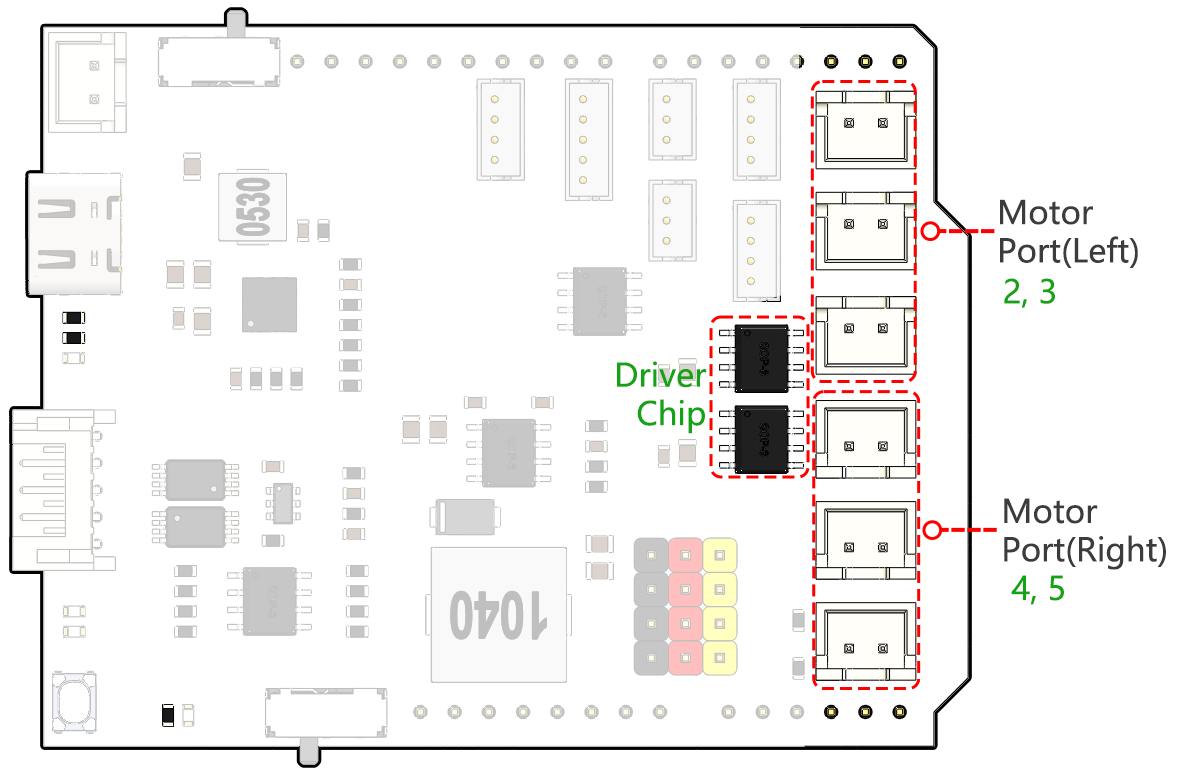
- Motor Port
Motor Port(Right): 3 Motoren können angeschlossen werden, aber alle 3 Motoren werden von demselben Satz Signalen Pins 2 und 3 gesteuert.
Motor Port(Left): 3 Motoren können angeschlossen werden, aber alle 3 Motoren werden von demselben Satz Signalen Pins 4 und 5 gesteuert.
Anschlusstyp: XH2.54, 2P.
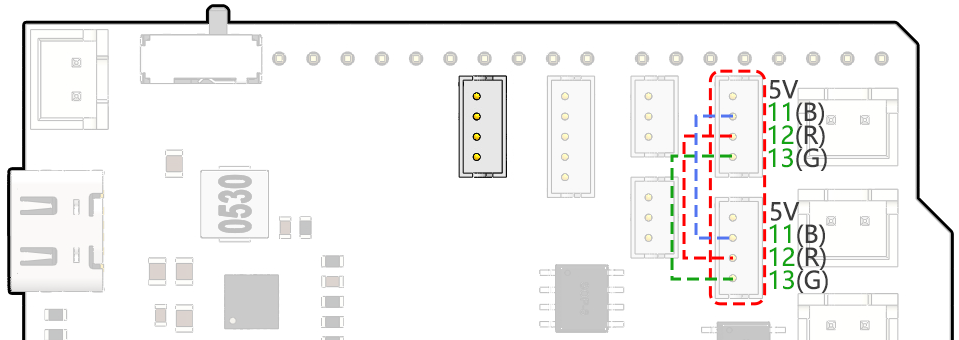
- RGB Strip
Zum Anschluss von 2 RGB-LED-Streifen, die drei Pins des Streifens sind an 12, 13 und 11 angeschlossen.
Anschlusstyp: ZH1.5, 4P.
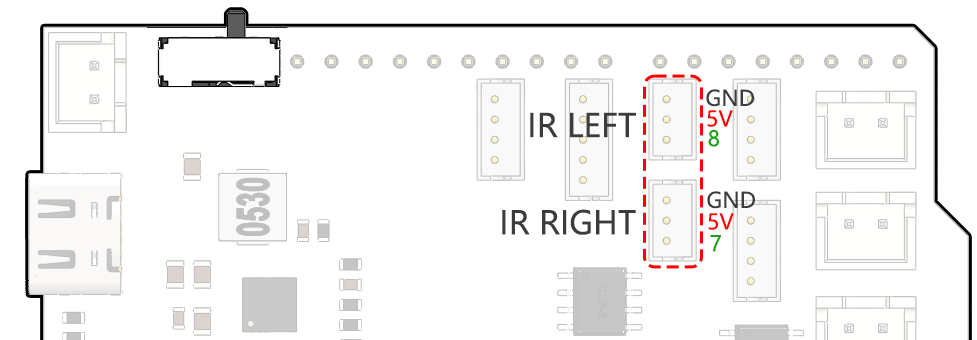
- LEFT/RIGHT IR
Zum Anschluss von zwei IR-Hindernisvermeidungsmodulen.
Das left obstacle avoidance module wird an Pin 8 angeschlossen, das right obstacle avoidance module an Pin 7.
Anschlusstyp: ZH1.5, 3P.
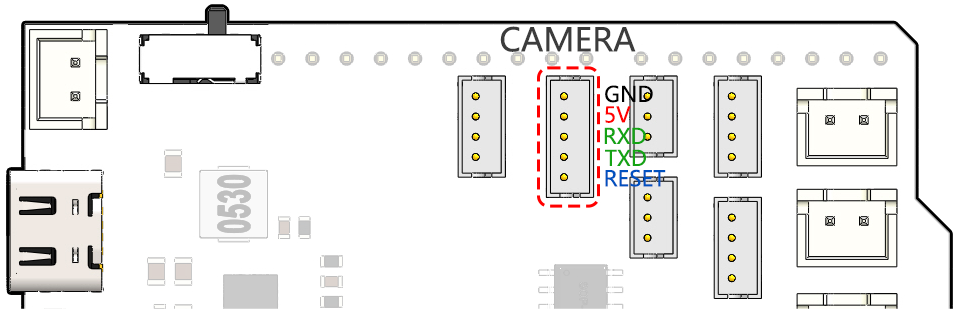
- CAMERA
Der Kamera-Adapter-Board-Anschluss.
Anschlusstyp: ZH1.5, 5P.
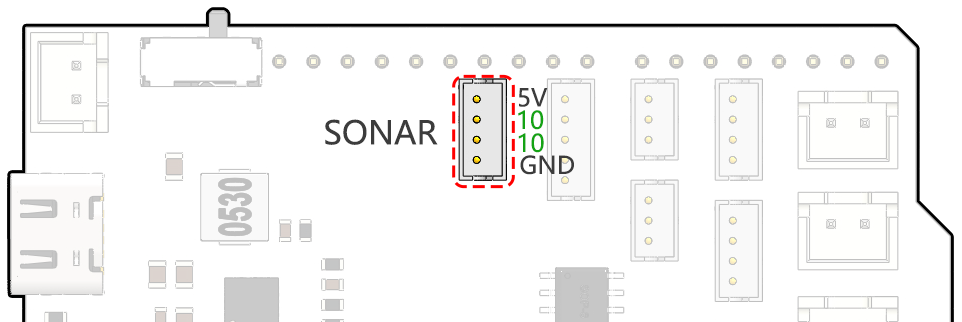
- SONAR
Zum Anschluss des Ultraschallmoduls, sowohl Trig- als auch Echo-Pins sind an Pin 10 des Arduino-Boards angeschlossen.
Anschlusstyp: ZH1.5, 4P.
- Mode Switch
Der ESP32-CAM und das Arduino-Board teilen sich dieselben RX (Empfang) und TX (Sendung) Pins.
Daher müssen Sie beim Hochladen von Code diesen Schalter auf die right side umlegen, um den ESP32-CAM zu trennen und so Konflikte oder potenzielle Probleme zu vermeiden.
Wenn Sie die Kamera verwenden möchten, stellen Sie diesen Schalter auf die left side, sodass der ESP32-CAM mit dem Arduino-Board kommunizieren kann.
- SOLAR
Dies ist der Anschluss für das Solarpanel, das den Akku aufladen kann, wenn es an das Solarpanel angeschlossen ist.
Anschlusstyp: XH2.54, 2P.
SONAR
Hier ist die Pinbelegung für den ZH1.5-4P Ultraschallanschluss, wobei die Trig- & Echo-Pins mit Pin 10 des Arduino-Boards verbunden sind.
CAMERA
Das Pin-Diagramm des Kameraadapter-Interfaces wird hier gezeigt, der Typ ist ZH1.5-7P.
TX und RX werden für ESP32 CAM verwendet.
LEFT/RIGHT IR
Hier ist die Pinbelegung des Hindernisvermeidungsanschlusses.
RGB Strip
Unten ist das Pin-Diagramm der zwei parallel angeschlossenen RGB LED-Streifen, deren Pinbelegungen gleich sind.
Motor Port
Hier ist die Pinbelegung der 2 Sätze von Motoranschlüssen.