Note
Bonjour, bienvenue dans la communauté SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts sur Facebook ! Plongez plus profondément dans l’univers du Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Support d’experts : Résolvez les problèmes post-vente et les défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre & Partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Bénéficiez d’un accès anticipé aux nouvelles annonces de produits et aperçus.
Réductions spéciales : Profitez de réductions exclusives sur nos derniers produits.
Promotions festives et concours : Participez à des concours et des promotions de fêtes.
👉 Prêt à explorer et créer avec nous ? Cliquez sur [Ici] et rejoignez-nous dès aujourd’hui !
2.1.4 Potentiomètre
Note
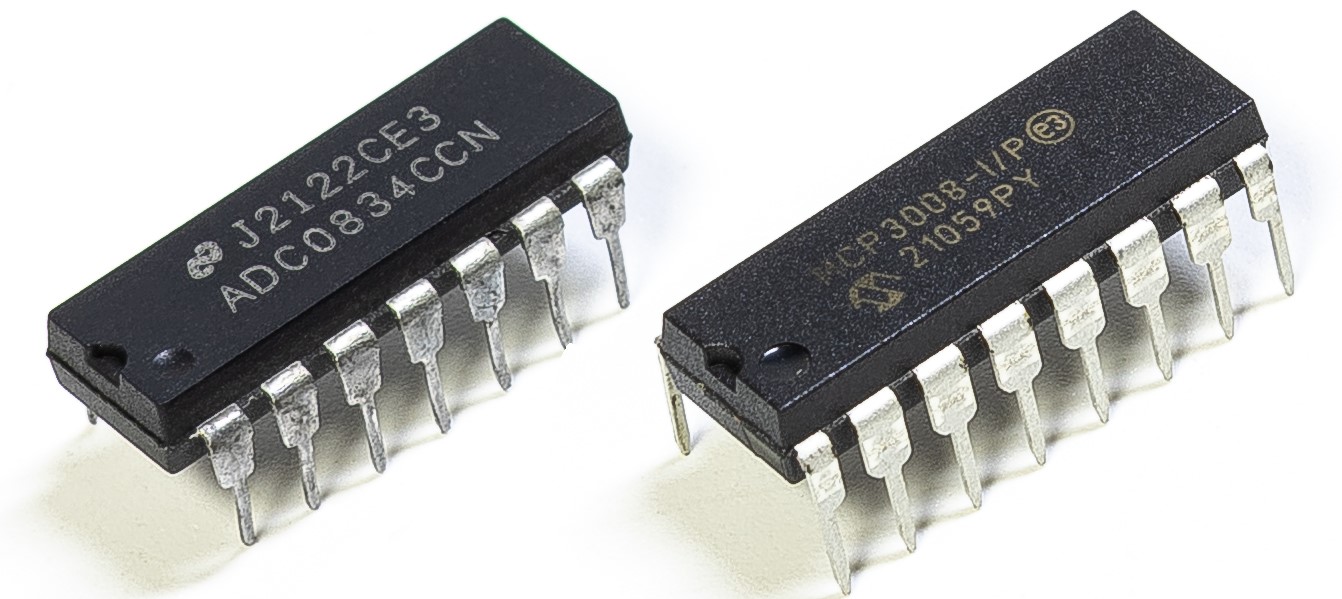
Selon la version de votre kit, identifiez si vous disposez du ADC0834 ou du MCP3008 et suivez la section correspondante.
Introduction
La fonction ADC peut être utilisée pour convertir des signaux analogiques en signaux numériques. Dans cette expérience, nous utilisons l’ADC0834 pour réaliser cette conversion avec un potentiomètre. Le potentiomètre modifie la quantité physique — la tension — qui est ensuite convertie par la fonction ADC.
Composants

Principe
ADC0834
L’ADC0834 est un convertisseur analogique-numérique 8 bits à successive approximation équipé d’un multiplexeur multicanal configurable et d’une entrée/sortie série. Cette entrée/sortie série est conçue pour interfacer avec des registres à décalage ou des microprocesseurs.

Séquence d’Opération La conversion est initiée en plaçant CS à un niveau bas, ce qui active tous les circuits logiques. CS doit rester à un niveau bas pendant tout le processus de conversion. Un signal d’horloge est ensuite reçu du processeur. À chaque transition du signal d’horloge de bas en haut, les données sur DI sont envoyées dans le registre de décalage d’adresse du multiplexeur. Le premier signal haut sur l’entrée correspond au bit de démarrage. Un mot d’assignation de 3 à 4 bits suit le bit de démarrage. À chaque transition suivante de bas en haut du signal d’horloge, le bit de démarrage et le mot d’assignation sont décalés dans le registre de décalage. Lorsque le bit de démarrage atteint la position de démarrage du registre du multiplexeur, le canal d’entrée est sélectionné et la conversion commence. La sortie SAR Statu (SARS) passe à un niveau haut pour indiquer qu’une conversion est en cours, et l’entrée DI du registre de décalage du multiplexeur est désactivée pendant la durée de la conversion.
Un intervalle d’une période d’horloge est automatiquement inséré pour permettre au canal multiplexé sélectionné de se stabiliser. La sortie des données (DO) quitte l’état haute impédance et fournit un niveau bas pour cette période d’horloge de stabilisation du multiplexeur. Le comparateur SAR compare les sorties successives de l’échelle résistive au signal analogique entrant. La sortie du comparateur indique si l’entrée analogique est supérieure ou inférieure à la sortie de l’échelle résistive. Au fur et à mesure que la conversion progresse, les données de conversion sont simultanément envoyées depuis la broche de sortie DO, en commençant par le bit de poids fort (MSB).
Après huit périodes d’horloge, la conversion est terminée et la sortie SARS passe à un niveau bas. Enfin, les données sont sorties, en commençant par le bit de poids faible (LSB) après le flux de données commençant par le MSB.

Table de contrôle d’adresse MUX de l’ADC0834

Potentiomètre
Le potentiomètre est un composant de résistance avec trois bornes dont la valeur de résistance peut être ajustée. Il est généralement composé d’un résistor et d’un contact mobile. Lorsque le contact se déplace le long du résistor, une certaine résistance ou une tension est générée en fonction du déplacement.

Les fonctions du potentiomètre dans le circuit sont les suivantes :
Servir de diviseur de tension
Le potentiomètre est une résistance ajustable en continu. Lorsque vous ajustez l’arbre ou le curseur du potentiomètre, le contact mobile se déplace sur le résistor. Une tension est alors générée en fonction de la tension appliquée et de l’angle ou de la distance parcourue par le bras mobile.
Schéma


Procédures Expérimentales
Étape 1 : Construisez le circuit.

Note
Placez la puce en vous référant à la position indiquée sur l’image. Veillez à ce que les rainures sur la puce soient orientées à gauche lors de son placement.
Pour les utilisateurs de langage C
Étape 2 : Ouvrez le fichier de code.
cd ~/davinci-kit-for-raspberry-pi/c/2.1.4/
Étape 3 : Compilez le code.
gcc 2.1.4_Potentiometer.c -lwiringPi
Étape 4 : Exécutez.
sudo ./a.out
Une fois le code exécuté, tournez le bouton du potentiomètre et l’intensité de la LED changera en conséquence.
Note
Si cela ne fonctionne pas après l’exécution, ou si un message d’erreur apparaît : « wiringPi.h: Aucun fichier ou répertoire de ce type », veuillez consulter Le code C ne fonctionne pas ?.
Code
#include <wiringPi.h>
#include <stdio.h>
#include <softPwm.h>
typedef unsigned char uchar;
typedef unsigned int uint;
#define ADC_CS 0
#define ADC_CLK 1
#define ADC_DIO 2
#define LedPin 3
uchar get_ADC_Result(uint channel)
{
uchar i;
uchar dat1=0, dat2=0;
int sel = channel > 1 & 1;
int odd = channel & 1;
digitalWrite(ADC_CLK, 1);
delayMicroseconds(2);
digitalWrite(ADC_CLK, 0);
delayMicroseconds(2);
pinMode(ADC_DIO, OUTPUT);
digitalWrite(ADC_CS, 0);
// Bit de démarrage
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// Mode Single End
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// ODD
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,odd); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// Sélection
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,sel); delayMicroseconds(2);
digitalWrite(ADC_CLK,1);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
for(i=0;i<8;i++)
{
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
pinMode(ADC_DIO, INPUT);
dat1=dat1<<1 | digitalRead(ADC_DIO);
}
for(i=0;i<8;i++)
{
dat2 = dat2 | ((uchar)(digitalRead(ADC_DIO))<<i);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
}
digitalWrite(ADC_CS,1);
pinMode(ADC_DIO, OUTPUT);
return(dat1==dat2) ? dat1 : 0;
}
int main(void)
{
uchar analogVal;
if(wiringPiSetup() == -1){ //si l'initialisation échoue, affichage du message d'erreur
printf("setup wiringPi failed !");
return 1;
}
softPwmCreate(LedPin, 0, 100);
pinMode(ADC_CS, OUTPUT);
pinMode(ADC_CLK, OUTPUT);
while(1){
analogVal = get_ADC_Result(0);
printf("Current analogVal : %d\n", analogVal);
delay(100);
softPwmWrite(LedPin, analogVal);
delay(100);
}
return 0;
}
Explication du code
#define ADC_CS 0
#define ADC_CLK 1
#define ADC_DIO 2
#define LedPin 3
Définissez CS, CLK, DIO pour l’ADC0834, et connectez-les respectivement à GPIO0, GPIO1 et GPIO2. Ensuite, connectez la LED à GPIO3.
uchar get_ADC_Result(uint channel)
{
uchar i;
uchar dat1=0, dat2=0;
int sel = channel > 1 & 1;
int odd = channel & 1;
digitalWrite(ADC_CLK, 1);
delayMicroseconds(2);
digitalWrite(ADC_CLK, 0);
delayMicroseconds(2);
pinMode(ADC_DIO, OUTPUT);
digitalWrite(ADC_CS, 0);
// Bit de démarrage
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// Mode Single End
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// Impair
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,odd); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
// Sélection
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,sel); delayMicroseconds(2);
digitalWrite(ADC_CLK,1);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
for(i=0;i<8;i++)
{
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
pinMode(ADC_DIO, INPUT);
dat1=dat1<<1 | digitalRead(ADC_DIO);
}
for(i=0;i<8;i++)
{
dat2 = dat2 | ((uchar)(digitalRead(ADC_DIO))<<i);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
}
digitalWrite(ADC_CS,1);
pinMode(ADC_DIO, OUTPUT);
return(dat1==dat2) ? dat1 : 0;
}
Il s’agit d’une fonction pour l’ADC0834 qui permet d’effectuer une conversion analogique-numérique. Le déroulement spécifique est le suivant :
digitalWrite(ADC_CS, 0);
Réglez CS sur niveau bas pour commencer l’activation de la conversion AD.
// Bit de démarrage
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
Lorsque la première transition de l’entrée d’horloge de bas en haut se produit, réglez DIO sur 1 en tant que bit de démarrage. Dans les trois étapes suivantes, il y a trois mots d’affectation.
// Mode Single End
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
Lors de la deuxième transition de l’horloge, réglez DIO sur 1 pour choisir le mode Single End.
// Impair
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,odd); delayMicroseconds(2);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
Pour la troisième transition, la valeur de DIO est contrôlée par la variable odd.
// Sélection
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,sel); delayMicroseconds(2);
digitalWrite(ADC_CLK,1);
À la quatrième transition de l’horloge, la valeur de DIO est contrôlée par la variable sel.
Si channel=0, sel=0, odd=0, les formules opératoires concernant sel et odd sont les suivantes :
int sel = channel > 1 & 1;
int odd = channel & 1;
Lorsque channel=1, sel=0, odd=1, reportez-vous à la table de logique de contrôle de l’adresse ci-dessous. Ici, CH1 est sélectionné et le bit de démarrage est transféré à l’emplacement de démarrage du registre multiplexeur et la conversion commence.

digitalWrite(ADC_DIO,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0);
digitalWrite(ADC_DIO,1); delayMicroseconds(2);
Ici, DIO est réglé deux fois sur 1, cela peut être ignoré.
for(i=0;i<8;i++)
{
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
pinMode(ADC_DIO, INPUT);
dat1=dat1<<1 | digitalRead(ADC_DIO);
}
Dans la première boucle for(), dès que le cinquième signal d’horloge passe de haut à bas, DIO est réglé en mode entrée. La conversion commence alors et la valeur convertie est stockée dans la variable dat1. Après huit périodes d’horloge, la conversion est terminée.
for(i=0;i<8;i++)
{
dat2 = dat2 | ((uchar)(digitalRead(ADC_DIO))<<i);
digitalWrite(ADC_CLK,1); delayMicroseconds(2);
digitalWrite(ADC_CLK,0); delayMicroseconds(2);
}
Dans la deuxième boucle for(), les valeurs converties sont sorties via DO après huit autres périodes d’horloge et stockées dans la variable dat2.
digitalWrite(ADC_CS,1);
pinMode(ADC_DIO, OUTPUT);
return(dat1==dat2) ? dat1 : 0;
return(dat1==dat2) ? dat1 : 0 permet de comparer la valeur obtenue pendant la conversion et la valeur de sortie. Si elles sont égales, la valeur convertie dat1 est renvoyée ; sinon, 0 est renvoyé. Ici, le processus de conversion de l’ADC0834 est terminé.
softPwmCreate(LedPin, 0, 100);
La fonction utilise un PWM logiciel pour créer une broche PWM, LedPin, avec une largeur d’impulsion initiale de 0 et une période de PWM de 100 x 100 µs.
while(1){
analogVal = get_ADC_Result(0);
printf("Current analogVal : %d\n", analogVal);
softPwmWrite(LedPin, analogVal);
delay(100);
}
Dans le programme principal, la valeur de la chaîne 0, connectée à un potentiomètre, est lue et stockée dans la variable analogVal, puis écrite dans LedPin. Vous pouvez alors observer la variation de la luminosité de la LED en fonction de la valeur du potentiomètre.
Pour les utilisateurs Python
Étape 2 : Ouvrez le fichier de code
cd ~/davinci-kit-for-raspberry-pi/python/
Étape 3 : Exécuter.
sudo python3 2.1.4_Potentiometer.py
Après l’exécution du code, tournez le bouton du potentiomètre, l’intensité de la LED changera en conséquence.
Code
Note
Vous pouvez Modifier/Réinitialiser/Copier/Exécuter/Arrêter le code ci-dessous. Mais avant cela, vous devez aller au chemin source du code comme davinci-kit-for-raspberry-pi/python.
import RPi.GPIO as GPIO
import ADC0834
import time
LedPin = 22
def setup():
global led_val
# Configurer le mode GPIO en numérotation BCM
GPIO.setmode(GPIO.BCM)
# Configurer le mode LedPin en sortie avec un niveau initial élevé (3,3V)
GPIO.setup(LedPin, GPIO.OUT, initial=GPIO.HIGH)
ADC0834.setup()
# Configurer la LED comme canal PWM avec une fréquence de 2kHz
led_val = GPIO.PWM(LedPin, 2000)
# Démarrer avec une valeur initiale de 0
led_val.start(0)
def destroy():
# Arrêter tous les canaux PWM
led_val.stop()
# Libérer les ressources
GPIO.cleanup()
def loop():
while True:
analogVal = ADC0834.getResult()
print ('analog value = %d' % analogVal)
led_val.ChangeDutyCycle(analogVal*100/255)
time.sleep(0.2)
if __name__ == '__main__':
setup()
try:
loop()
except KeyboardInterrupt: # Lorsque 'Ctrl+C' est appuyé, la fonction destroy() est exécutée.
destroy()
Explication du code
import ADC0834
Importer la bibliothèque ADC0834. Vous pouvez vérifier le contenu de la bibliothèque en appelant la commande nano ADC0834.py.
def setup():
global led_val
# Configurer le mode GPIO en numérotation BCM
GPIO.setmode(GPIO.BCM)
# Configurer le mode LedPin en sortie avec un niveau initial élevé (3,3V)
GPIO.setup(LedPin, GPIO.OUT, initial=GPIO.HIGH)
ADC0834.setup()
# Configurer la LED comme canal PWM avec une fréquence de 2kHz
led_val = GPIO.PWM(LedPin, 2000)
# Démarrer avec une valeur initiale de 0
led_val.start(0)
Dans la fonction setup(), définissez le mode BCM pour la numérotation, configurez LedPin comme canal PWM et réglez la fréquence à 2 kHz.
ADC0834.setup() : Initialise l’ADC0834 et connecte les broches définies CS, CLK, DIO de l’ADC0834 aux GPIO17, GPIO18 et GPIO27 respectivement.
def loop():
while True:
res = ADC0834.getResult()
print ('res = %d' % res)
R_val = MAP(res, 0, 255, 0, 100)
led_val.ChangeDutyCycle(R_val)
time.sleep(0.2)
La fonction getResult() est utilisée pour lire les valeurs analogiques des quatre canaux de l’ADC0834. Par défaut, elle lit la valeur du canal CH0. Pour lire les autres canaux, entrez le numéro du canal dans les parenthèses, par exemple getResult(1).
La fonction loop() lit d’abord la valeur de CH0 et l’assigne à la variable res. Ensuite, la fonction MAP est appelée pour mapper la valeur lue du potentiomètre entre 0 et 100. Cette étape permet de contrôler le cycle de travail de LedPin. Vous verrez alors la luminosité de la LED varier en fonction de la valeur du potentiomètre.
Image du phénomène
