Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
Manual Control¶
Step 1
First rotate the 4 potentiometers of the Rollarm to the forward facing position, in order to keep the Rollarm as it was just assembled after uploading the code below.

Step 2
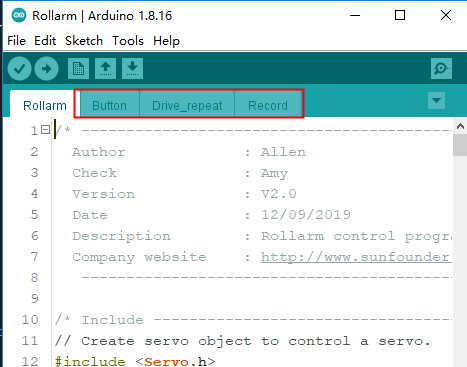
Run the Rollarm.ino code under the path DIY Control Robot Arm kit for Arduino-Rollarm\\Arduino Code\\Rollarm. There are four code files in Rollarm, Rollarm.ino is the main program, when the others are subprograms.
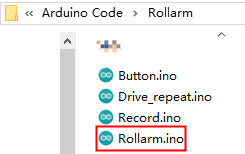
When you open the main program, the subprograms will be opened automatically:
Step 3
Select the corresponding board and port, then click Upload.
Step 4
After the code upload, turn the power switch on, then we can try to control the Rollarm.
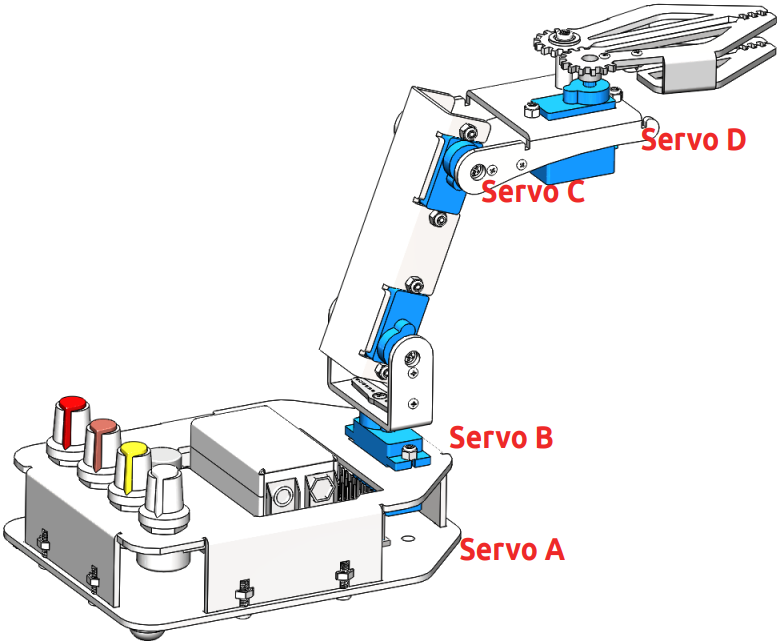
White potentiometer to control the Servo D
The yellow potentiometer to control Servo C
The orange potentiometer to control Servo B
The red potentiometer to control Servo A
Record behavior¶
Also Rollarm.ino has the function of recording actions, now look at how to use this function.
Rotate a potentiometer to control a Servo to the desired position.
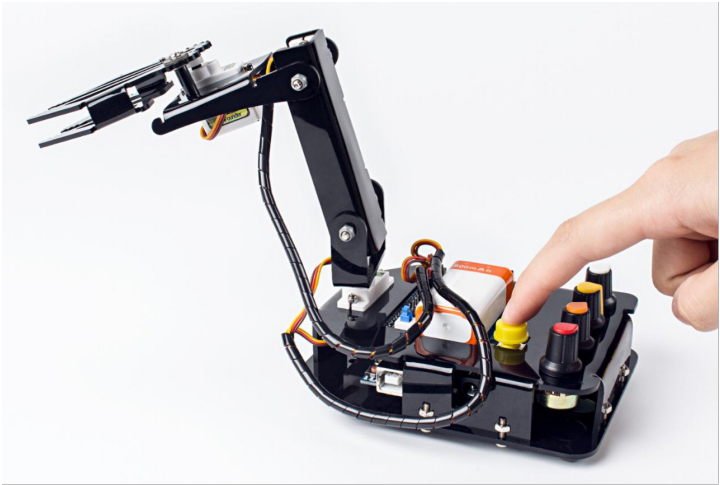
Record this step by pressing the yellow button shortly.
You can record as many steps as you like, up to a maximum of 100.
Now press and hold the yellow button to get Rollarm to resume the recorded steps.
Code Explanation¶
Since the Rollarm has four Servos acting as the moving joint, we need to include a header file for driving the Servos and define them.
//Create Servo object to control a Servo.
#include <Servo.h>
Servo Servo_0;
Servo Servo_1;
Servo Servo_2;
Servo Servo_3;
After defining the function of driving the Servos, we need to read the analog value of the potentiometers and convert them into the rotating angle of the Servos.
//Read the values ot the potentiometers.
void ReadPot()
{
SensVal[0] = 0;
SensVal[1] = 0;
SensVal[2] = 0;
SensVal[3] = 0;
SensVal[0] = analogRead(A0);
SensVal[1] = analogRead(A1);
SensVal[2] = analogRead(A2);
SensVal[3] = analogRead(A3);
}
//The value of the potentiometer is matched to the angle value.
void Mapping0()
{
SensVal[0] = map(SensVal[0], 0, 1023, 10, 170);
SensVal[1] = map(SensVal[1], 0, 1023, 10, 170);
SensVal[2] = map(SensVal[2], 0, 1023, 10, 170);
SensVal[3] = map(SensVal[3], 0, 1023, 100, 180);
}
After compiling the program, we need to make Rollarm remember the steps, which is done through pressing the button.
//Calculate the time the button pressed
void Button()
{
if (digitalRead(3) == 0)
{
delay(10);
if (digitalRead(3) == 0)
{
KeyValue = 0;
while (!digitalRead(3))
{
KeyValue++;
delay(100);
}
}
}
}
We can tell which part of the code the Rollarm is performing by reading the value upon pressing the button. When the value is larger than 10, it means Rollarm is repeating the steps. When it is between 0 and 10, it means Rollarm is remembering. And when it is 0, it means Rollarm is being controlled by the potentiometers. The specific program is as follows:
//Check the button.
static int Flag = 1;
Button();
//The time of pressing the button is not long then record the action.
if ((KeyValue < 10) && (KeyValue > 0))
{
KeyValue = 0;
Record();
Mapping1();
}
//Long press the button and open the auto mode,start repeating the action.
else if (KeyValue > 10)
{
if (Flag == 1)
{
Flag = 0;
Calculate();
}
Drive_init();
delay(3000);
for (int i = 1; i < Time; i++)
{
Drive_repeat(i);
delay(500);
}
}
//Did not press the button, open the manual mode.
else
{
ReadPot();
Mapping0();
Next, we are going to call the function to write the value of the Servo rotating angle. However, it is not merely about writing the values directly; the difference between two adjacent rotating values will also be written into the Servos. Here we take a Servo program for example.
//The first axis.
if (Dif0[n] > 0)
{
for (int j = Joint0[n - 1]; j <= Joint0[n]; j++)
{
Servo_0.write(j);
delay(10);
}
}
else
{
for (int j = Joint0[n - 1]; j >= Joint0[n]; j--)
{
Servo_0.write(j);
delay(10);
}
}