Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
2.2.8 Ultraschallsensormodul
Einführung
Das Ultraschallsensormodul verwendet Ultraschallwellen, um Objekte genau zu erkennen und Distanzen zu messen. Es sendet Ultraschallwellen aus und wandelt diese in elektronische Signale um.
Benötigte Komponenten
Für dieses Projekt benötigen wir folgende Komponenten.
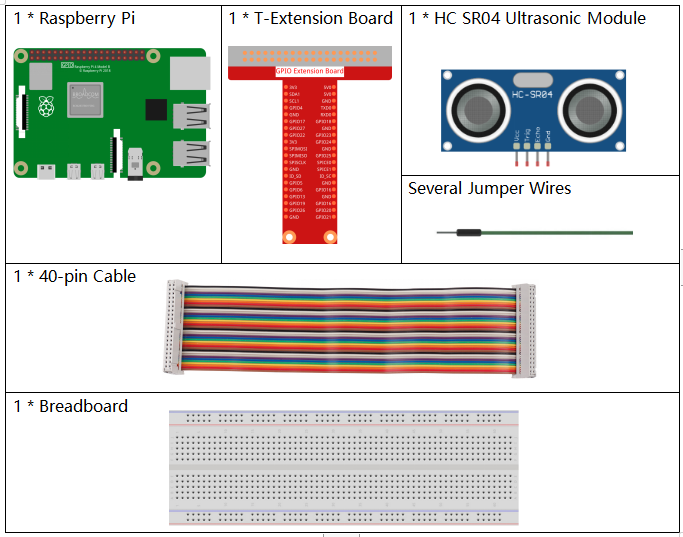
Es ist definitiv praktisch, ein ganzes Set zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM SET |
LINK |
|---|---|---|
Raphael Kit |
337 |
Sie können diese auch einzeln über die untenstehenden Links kaufen.
KOMPONENTENVORSTELLUNG |
KAUF-LINK |
|---|---|
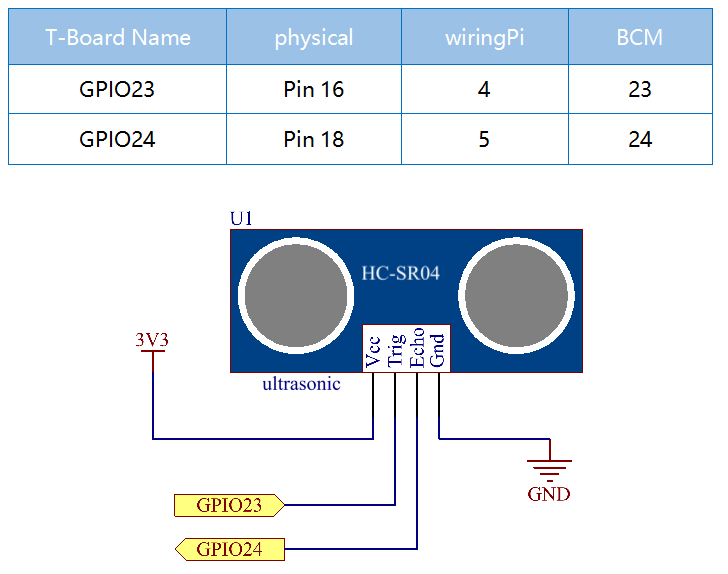
Schaltplan
Experimentelle Verfahren
Schritt 1: Baue die Schaltung.

Schritt 2: Gehe zum Ordner des Codes.
cd ~/raphael-kit/python-pi5
Schritt 3: Führe die ausführbare Datei aus.
sudo python3 2.2.8_Ultrasonic_zero.py
Nachdem der Code ausgeführt wurde, erkennt das Ultraschallsensormodul die Distanz zwischen dem Hindernis vor dem Modul und dem Modul selbst, dann wird der Distanzwert auf dem Bildschirm angezeigt.
Warnung
Wenn die Fehlermeldung RuntimeError: Cannot determine SOC peripheral base address angezeigt wird, lesen Sie bitte If gpiozero doesn’t work.
Code
Bemerkung
Sie können den untenstehenden Code modifizieren/zurücksetzen/kopieren/ausführen/stoppen. Bevor Sie das tun, müssen Sie jedoch zum Quellcodepfad wie raphael-kit/python-pi5 wechseln. Nachdem Sie den Code modifiziert haben, können Sie ihn direkt ausführen, um den Effekt zu sehen.
#!/usr/bin/env python3
from gpiozero import DistanceSensor
from time import sleep
# Initialize the DistanceSensor using GPIO Zero library
# Trigger pin is connected to GPIO 23, Echo pin to GPIO 24
sensor = DistanceSensor(echo=24, trigger=23)
try:
# Main loop to continuously measure and report distance
while True:
dis = sensor.distance * 100 # Measure distance and convert from meters to centimeters
print('Distance: {:.2f} cm'.format(dis)) # Print the distance with two decimal precision
sleep(0.3) # Wait for 0.3 seconds before the next measurement
except KeyboardInterrupt:
# Handle KeyboardInterrupt (Ctrl+C) to gracefully exit the loop
pass
Code-Erklärung
Importiert die Klasse
DistanceSensoraus dergpiozeroBibliothek zur Distanzmessung und die Funktionsleepaus dem Modultimefür Verzögerungen.#!/usr/bin/env python3 from gpiozero import DistanceSensor from time import sleep
Initialisiert den Ultraschallsensor mit dem Echo-Pin an GPIO 24 und dem Trigger-Pin an GPIO 23.
# Initialize the DistanceSensor using GPIO Zero library # Trigger pin is connected to GPIO 23, Echo pin to GPIO 24 sensor = DistanceSensor(echo=24, trigger=23)
Die Hauptschleife misst kontinuierlich die Distanz, wandelt sie von Metern in Zentimeter um und gibt sie mit zwei Dezimalstellen an. Dann wartet sie 0.3 Sekunden und misst die Distanz erneut. Fängt ein KeyboardInterrupt (wie Strg+C) ab, um einen sanften Ausstieg aus dem Skript zu ermöglichen.
try: # Main loop to continuously measure and report distance while True: dis = sensor.distance * 100 # Measure distance and convert from meters to centimeters print('Distance: {:.2f} cm'.format(dis)) # Print the distance with two decimal precision sleep(0.3) # Wait for 0.3 seconds before the next measurement except KeyboardInterrupt: # Handle KeyboardInterrupt (Ctrl+C) to gracefully exit the loop pass