Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
2.1.6 Drehencoder-Modul
Einleitung
In diesem Projekt werden Sie den Drehencoder kennenlernen. Ein Drehencoder ist ein elektronischer Schalter mit einer Reihe von regelmäßigen Impulsen in streng zeitlicher Reihenfolge. In Verbindung mit einem IC kann er zur Erhöhung, Verringerung, zum Umblättern und für andere Operationen wie Maus-Scrolling, Menüauswahl usw. verwendet werden.
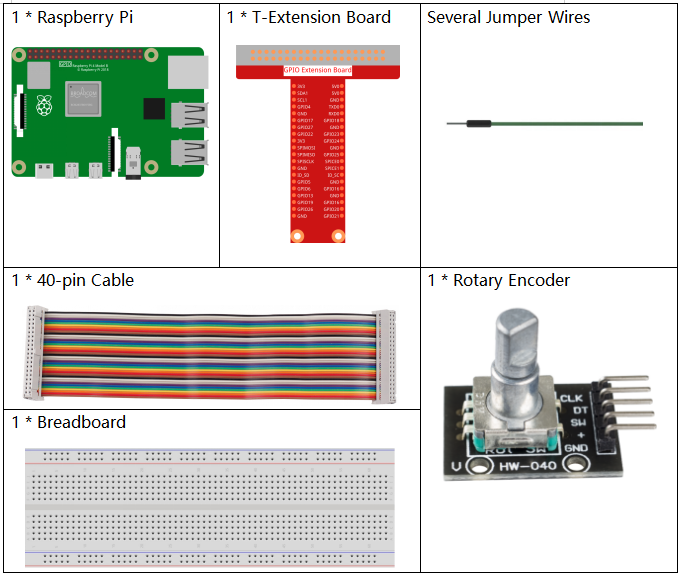
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist definitiv praktisch, ein ganzes Kit zu kaufen, hier ist der Link:
Name |
IN DIESEM KIT ENTHALTENE TEILE |
LINK |
|---|---|---|
Raphael Kit |
337 |
Sie können sie auch separat über die unten stehenden Links kaufen.
KOMPONENTENVORSTELLUNG |
KAUF-LINK |
|---|---|
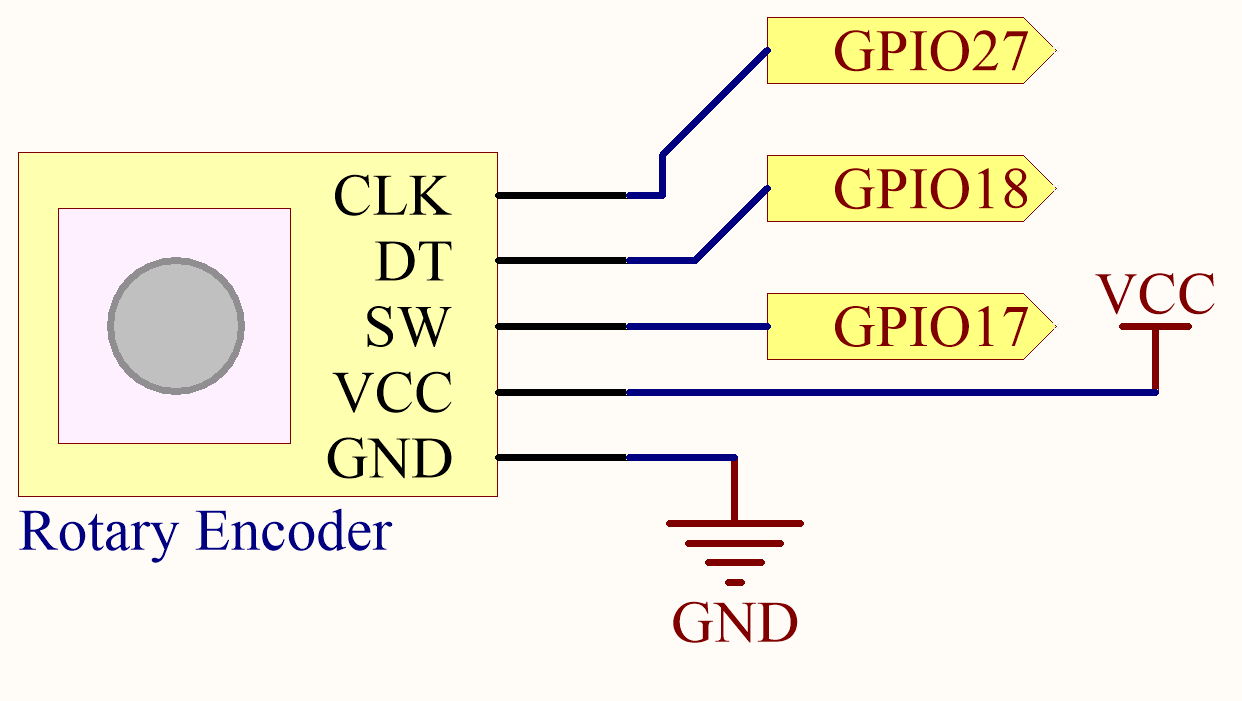
Schaltplan
Experimentelle Verfahren
Schritt 1: Bauen Sie den Schaltkreis auf.
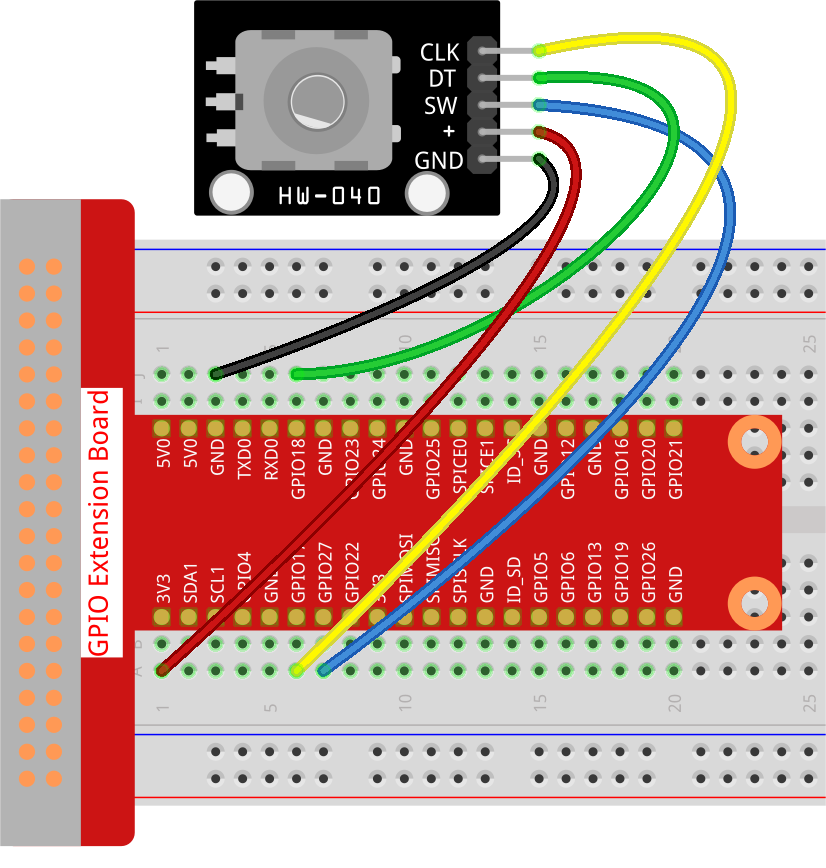
In diesem Beispiel können wir den Drehencoder direkt mit dem Raspberry Pi über ein Steckbrett und ein 40-Pin-Kabel verbinden, den GND des Drehencoders mit GND, 「+」mit 5V, SW mit digitalem GPIO27, DT mit digitalem GPIO18 und CLK mit digitalem GPIO 17 verbinden.
Schritt 2: Öffnen Sie die Code-Datei.
cd ~/raphael-kit/python-pi5
Schritt 3: Führen Sie den Code aus.
sudo python3 2.1.6_RotaryEncoder_zero.py
Sie werden den Zählerstand in der Shell sehen. Wenn Sie den Drehencoder im Uhrzeigersinn drehen, wird der Zähler erhöht; wenn Sie ihn gegen den Uhrzeigersinn drehen, wird der Zähler verringert. Wenn Sie den Schalter am Drehencoder drücken, werden die Messwerte auf null zurückgesetzt.
Warnung
Wenn die Fehlermeldung RuntimeError: Cannot determine SOC peripheral base address angezeigt wird, lesen Sie bitte If gpiozero doesn’t work.
Code
Bemerkung
Sie können den unten stehenden Code modifizieren/zurücksetzen/kopieren/ausführen/stoppen. Aber zuvor müssen Sie zum Quellcodepfad wie raphael-kit/python-pi5 gehen. Nachdem Sie den Code modifiziert haben, können Sie ihn direkt ausführen, um den Effekt zu sehen.
#!/usr/bin/env python3
from gpiozero import RotaryEncoder, Button
from time import sleep
# Initialize the rotary encoder and button
encoder = RotaryEncoder(a=17, b=18) # Rotary Encoder connected to GPIO pins 17 (CLK) and 18 (DT)
button = Button(27) # Button connected to GPIO pin 27
global_counter = 0 # Track the rotary encoder's position
def rotary_change():
""" Update the global counter based on the rotary encoder's rotation. """
global global_counter
global_counter += encoder.steps # Adjust counter based on encoder steps
encoder.steps = 0 # Reset encoder steps after updating counter
print('Global Counter =', global_counter) # Display current counter value
def reset_counter():
""" Reset the global counter to zero when the button is pressed. """
global global_counter
global_counter = 0 # Reset the counter
print('Counter reset') # Indicate counter reset
# Assign the reset_counter function to button press event
button.when_pressed = reset_counter
try:
# Monitor rotary encoder continuously and process changes
while True:
rotary_change() # Handle rotary encoder changes
sleep(0.1) # Short delay to reduce CPU load
except KeyboardInterrupt:
# Gracefully handle a keyboard interrupt (Ctrl+C)
pass
Code-Analyse
Importiert die Klassen
RotaryEncoderundButtonaus der Bibliothekgpiozeround die Funktionsleepfür Verzögerungen.#!/usr/bin/env python3 from gpiozero import RotaryEncoder, Button from time import sleep
Initialisiert den Drehencoder mit den GPIO-Pins 17 und 18 und einen Knopf am GPIO-Pin 27.
# Initialize the rotary encoder and button encoder = RotaryEncoder(a=17, b=18) # Rotary Encoder connected to GPIO pins 17 (CLK) and 18 (DT) button = Button(27) # Button connected to GPIO pin 27
Deklariert eine globale Variable
global_counter, um die Position des Drehencoders zu verfolgen.global_counter = 0 # Track the rotary encoder's position
Definiert eine Funktion
rotary_change, um den globalen Zähler basierend auf der Drehung des Drehencoders zu aktualisieren.def rotary_change(): """ Update the global counter based on the rotary encoder's rotation. """ global global_counter global_counter += encoder.steps # Adjust counter based on encoder steps encoder.steps = 0 # Reset encoder steps after updating counter print('Global Counter =', global_counter) # Display current counter value
Definiert eine Funktion
reset_counter, um den globalen Zähler auf null zurückzusetzen, wenn der Knopf gedrückt wird.
def reset_counter(): """ Reset the global counter to zero when the button is pressed. """ global global_counter global_counter = 0 # Reset the counter print('Counter reset') # Indicate counter reset
Weist die Funktion
reset_counterdem Druckereignis des Knopfes zu.# Assign the reset_counter function to button press event button.when_pressed = reset_counter
In einer kontinuierlichen Schleife ruft das Skript
rotary_changeauf, um Änderungen am Drehencoder zu bearbeiten, und führt eine kurze Verzögerung ein, um die CPU-Last zu verringern. Verwendet einen try-except-Block, um KeyboardInterrupts anmutig zu behandeln.try: # Monitor rotary encoder continuously and process changes while True: rotary_change() # Handle rotary encoder changes sleep(0.1) # Short delay to reduce CPU load except KeyboardInterrupt: # Gracefully handle a keyboard interrupt (Ctrl+C) pass