Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
1.3.2 Servo
Einführung
In diesem Projekt werden wir lernen, wie man das Servo zum Drehen bringt.
Erforderliche Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
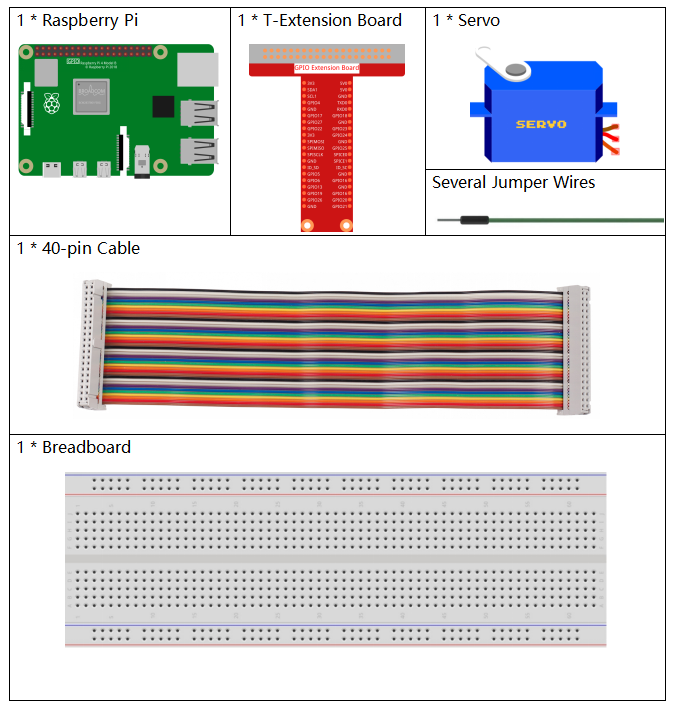
Es ist definitiv praktisch, ein ganzes Set zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM SET |
LINK |
|---|---|---|
Raphael Set |
337 |
Sie können sie auch einzeln über die untenstehenden Links kaufen.
KOMPONENTENBESCHREIBUNG |
KAUF-LINK |
|---|---|
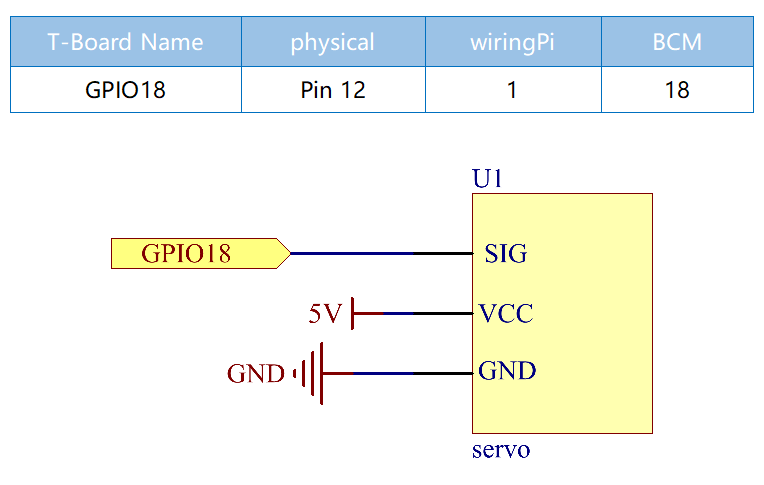
Schaltplan
Experimentelle Verfahren
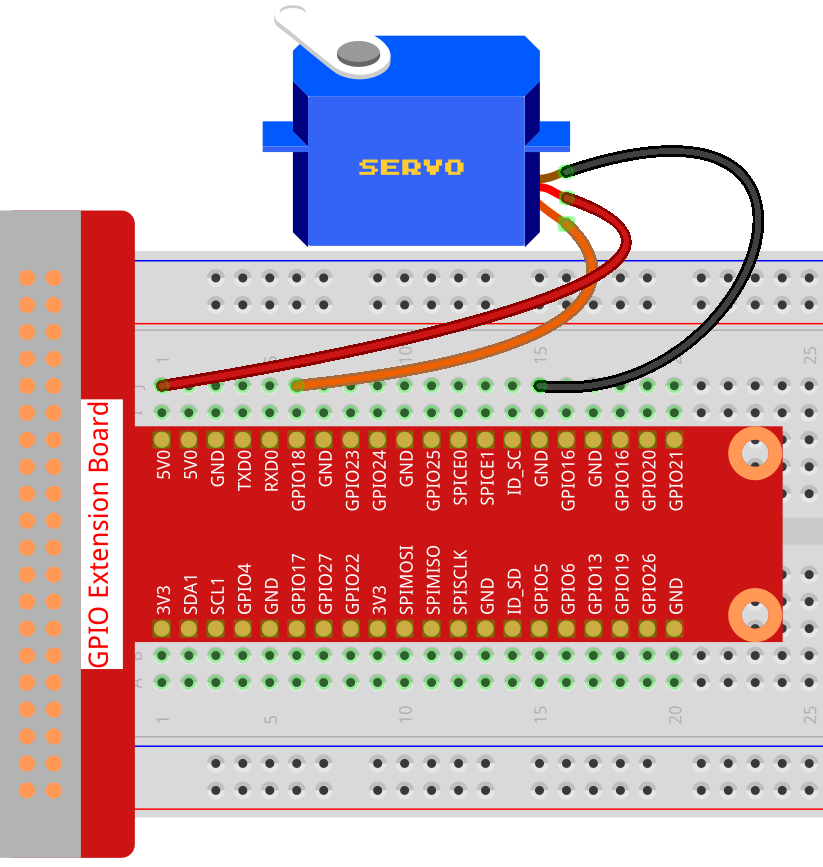
Schritt 1: Bauen Sie den Schaltkreis.
Schritt 2: Wechseln Sie in den Ordner des Codes.
cd ~/raphael-kit/python/
Schritt 3: Führen Sie die ausführbare Datei aus.
sudo python3 1.3.2_Servo.py
Nachdem das Programm ausgeführt wurde, wird das Servo von 0 Grad auf 180 Grad drehen und dann von 180 Grad auf 0 Grad, zyklisch.
Code
Bemerkung
Sie können den untenstehenden Code Modifizieren/Zurücksetzen/Kopieren/Ausführen/Stoppen. Aber bevor Sie das tun, müssen Sie zum Quellcode-Pfad wie raphael-kit/python wechseln. Nachdem Sie den Code geändert haben, können Sie ihn direkt ausführen, um das Ergebnis zu sehen.
import RPi.GPIO as GPIO
import time
SERVO_MIN_PULSE = 500
SERVO_MAX_PULSE = 2500
ServoPin = 18
def map(value, inMin, inMax, outMin, outMax):
return (outMax - outMin) * (value - inMin) / (inMax - inMin) + outMin
def setup():
global p
GPIO.setmode(GPIO.BCM) # Numbers GPIOs by BCM
GPIO.setup(ServoPin, GPIO.OUT) # Set ServoPin's mode is output
GPIO.output(ServoPin, GPIO.LOW) # Set ServoPin to low
p = GPIO.PWM(ServoPin, 50) # set Frequecy to 50Hz
p.start(0) # Duty Cycle = 0
def setAngle(angle): # make the servo rotate to specific angle (0-180 degrees)
angle = max(0, min(180, angle))
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)#map the angle to duty cycle and output it
def loop():
while True:
for i in range(0, 181, 5): #make servo rotate from 0 to 180 deg
setAngle(i) # Write to servo
time.sleep(0.002)
time.sleep(1)
for i in range(180, -1, -5): #make servo rotate from 180 to 0 deg
setAngle(i)
time.sleep(0.001)
time.sleep(1)
def destroy():
p.stop()
GPIO.cleanup()
if __name__ == '__main__': #Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the program destroy() will be executed.
destroy()
Code-Erklärung
p = GPIO.PWM(ServoPin, 50) # set Frequecy to 50Hz
p.start(0) # Duty Cycle = 0
Legen Sie den servoPin als PWM-Pin fest, setzen Sie dann die Frequenz auf 50hz und die Periode auf 20ms.
p.start(0): Starten Sie die PWM-Funktion und setzen Sie den Anfangswert auf 0.
def setAngle(angle): # make the servo rotate to specific angle (0-180 degrees)
angle = max(0, min(180, angle))
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)#map the angle to duty cycle and output it
Erstellen Sie eine Funktion, setAngle(), um einen Winkel von 0 bis 180 Grad in das Servo zu schreiben.
angle = max(0, min(180, angle))
Dieser Code dient dazu, den Winkel im Bereich von 0-180° zu begrenzen.
Die min()-Funktion gibt den kleinsten der eingegebenen Werte zurück. Wenn 180<angle, dann gibt 180 zurück, ansonsten angle.
Die max()-Methode gibt das größte Element in einem Iterable oder das größte von zwei oder mehr Parametern zurück. Wenn 0>angle, dann gibt 0 zurück, ansonsten angle.
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)
Um einen Bereich von 0 ~ 180° an das Servo zu übergeben, wird die Pulslänge des Servos auf 0,5ms(500us)-2,5ms(2500us) gesetzt.
Die Periode von PWM beträgt 20ms(20000us), so liegt das Tastverhältnis von PWM bei (500/20000)%-(2500/20000)%, und der Bereich von 0 ~ 180 wird auf 2,5 ~ 12,5 abgebildet.
Phänomen Bild