Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [here] und treten Sie heute bei!
2. Kalibrierung des PiDog
Einführung
Die Kalibrierung Ihres PiDog ist ein entscheidender Schritt, um einen stabilen und effizienten Betrieb sicherzustellen. Durch diesen Vorgang werden Ungleichgewichte oder Ungenauigkeiten korrigiert, die durch Montage- oder Strukturfehler entstehen können. Bitte folgen Sie den Anweisungen sorgfältig, um sicherzustellen, dass Ihr PiDog reibungslos läuft und wie erwartet funktioniert.
Wenn der Abweichungswinkel jedoch zu groß ist, kehren Sie zu Servoeinstellung (Wichtig) zurück, setzen Sie den Servowinkel auf 0° und montieren Sie den PiDog gemäß der Anleitung erneut.
Kalibrierungsvideo
Für eine detaillierte Anleitung sehen Sie sich das vollständige Kalibrierungsvideo an. Das Video zeigt Schritt für Schritt anschaulich, wie Sie Ihren PiDog präzise kalibrieren.
Bemerkung
Im PiDog-Bausatz ist ein Kalibrierungslineal mit 90° oder 60° enthalten. In unserem Video wird ein 90°-Lineal verwendet, aber der Vorgang für 60° ist weitgehend derselbe. Sie können sich auch die untenstehenden detaillierten Bild- und Textanweisungen ansehen.

Schritte
Gehen Sie wie folgt vor:
Platzieren Sie den PiDog auf einer ebenen Fläche.
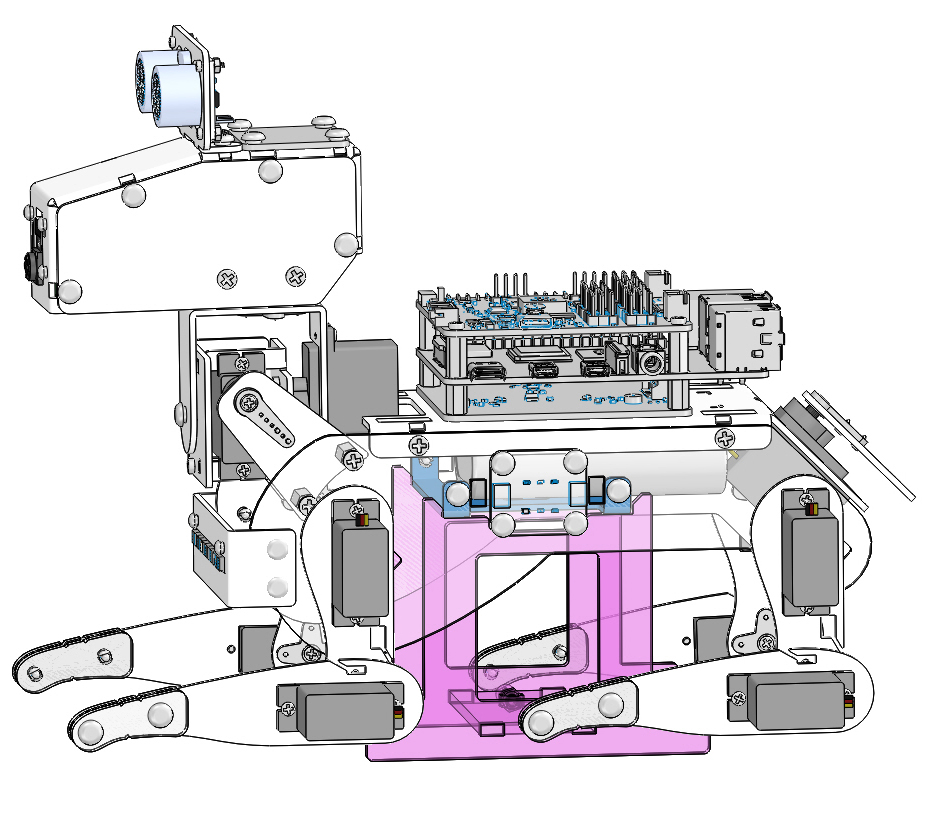
Wechseln Sie in das Beispielverzeichnis des PiDog und führen Sie das Skript
0_calibration.pyaus.cd ~/pidog/examples sudo python3 0_calibration.py
Nach dem Start des Skripts erscheint ein interaktives Terminalmenü. Wählen Sie je nach Typ Ihres Kalibrierungslineals: Wählen Sie die erste Option für 90° oder die zweite für 60°.
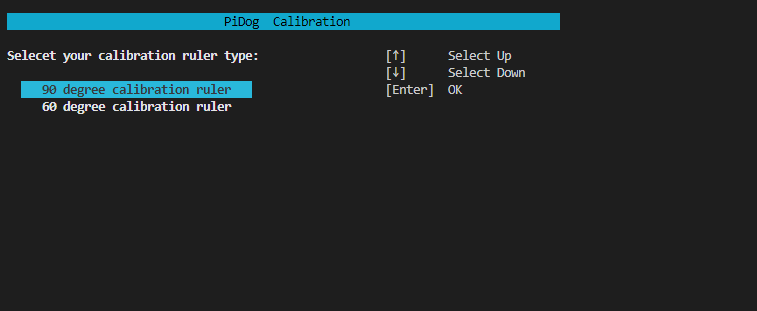
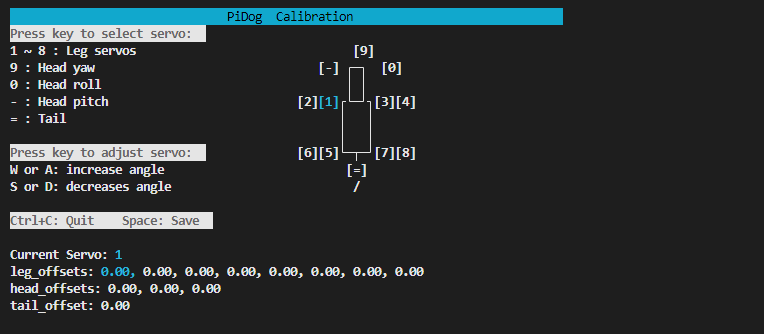
Danach gelangen Sie zur folgenden Kalibrierungsoberfläche:
Wenn Sie ein 60°-Kalibrierungslineal verwenden
Platzieren Sie das Kalibrierungslineal (Acryl-C-Platte) wie gezeigt, mit der langen Seite auf der horizontalen Fläche. Drücken Sie im Terminal
1und verwenden Sie die Tastenwunds, um die Kante auszurichten.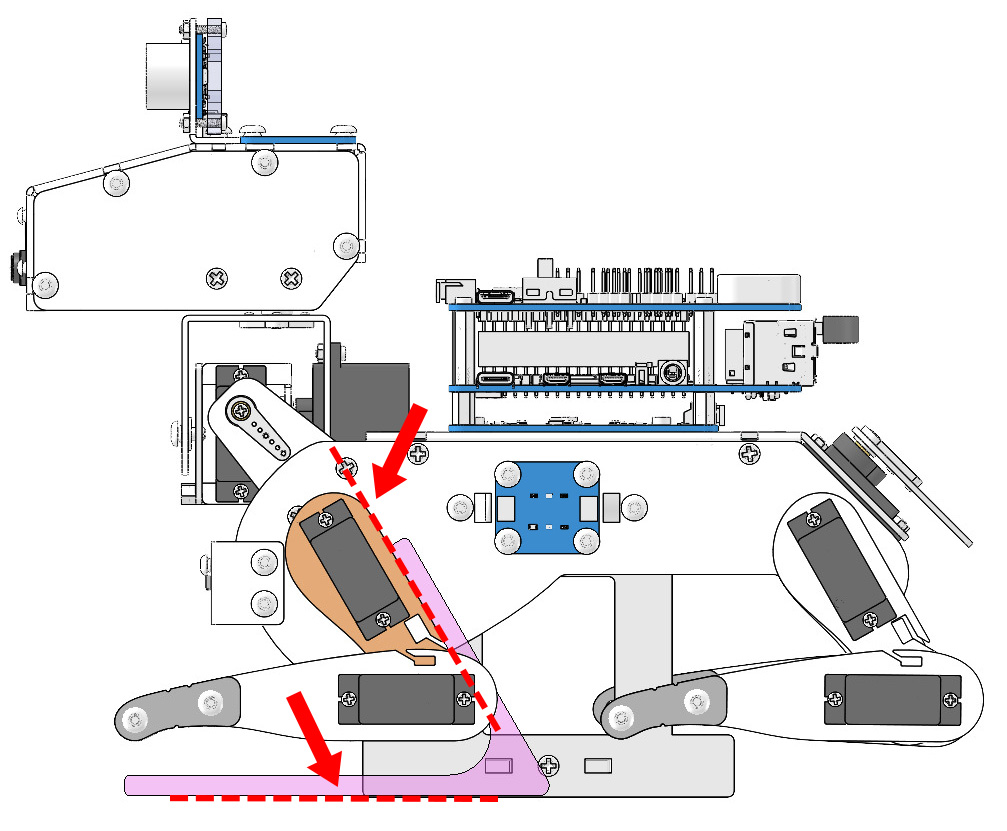
Platzieren Sie das Kalibrierungslineal wie unten gezeigt neu. Drücken Sie im Terminal
2und justieren Sie erneut mitwunds.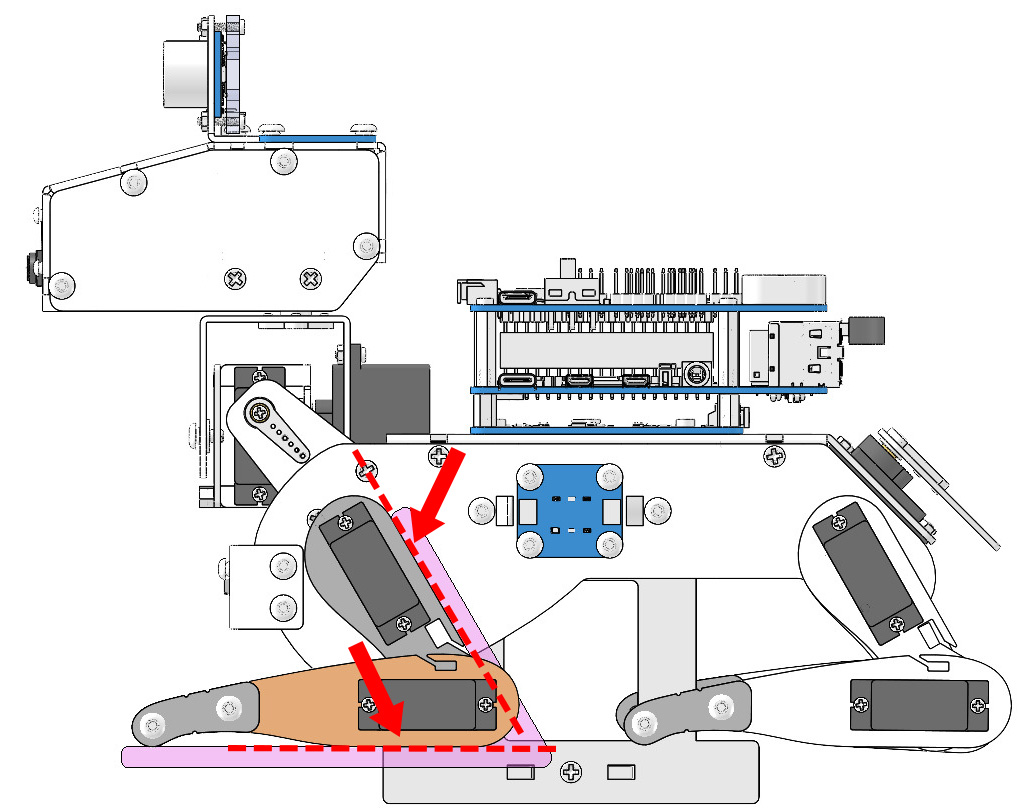
Wiederholen Sie diesen Kalibriervorgang für Servos 3 bis 8, um sicherzustellen, dass alle vier Beine des PiDog korrekt kalibriert sind.
Wenn Sie ein 90°-Kalibrierungslineal verwenden
Platzieren Sie das Kalibrierungslineal (Acryl-C-Platte) wie auf dem Bild gezeigt. Drücken Sie im Terminal
1und verwenden Siewunds, um die Kante korrekt auszurichten.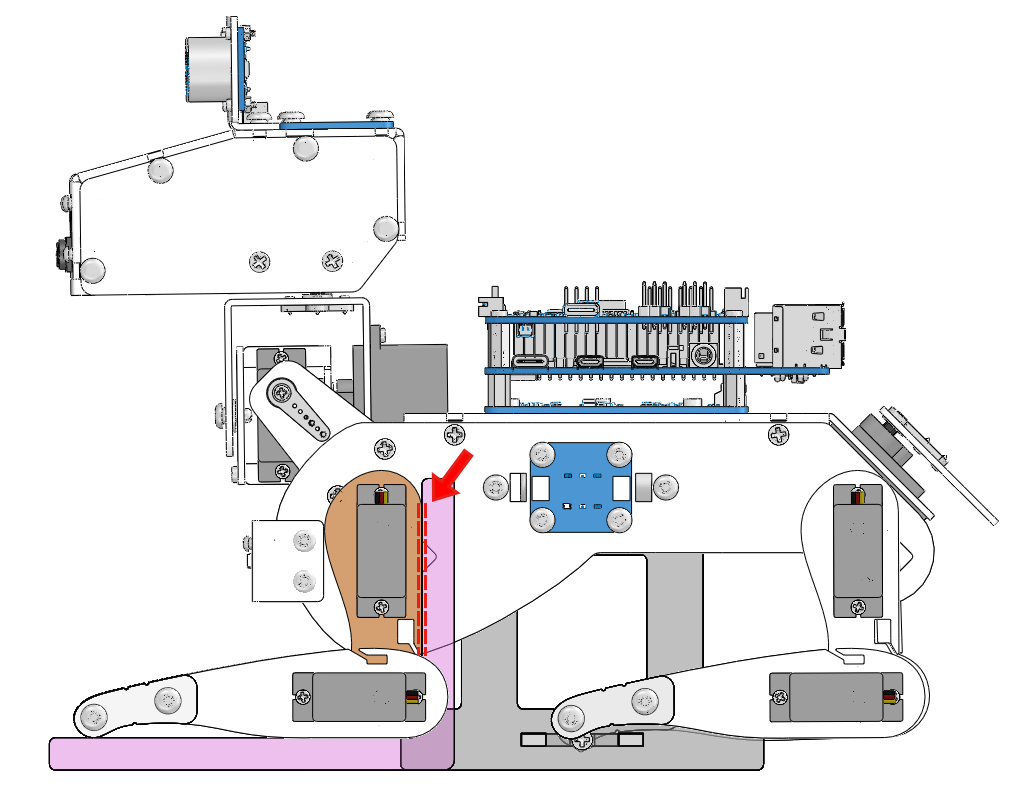
Platzieren Sie das Kalibrierungslineal erneut wie abgebildet. Drücken Sie im Terminal
2und justieren Sie mitwunds.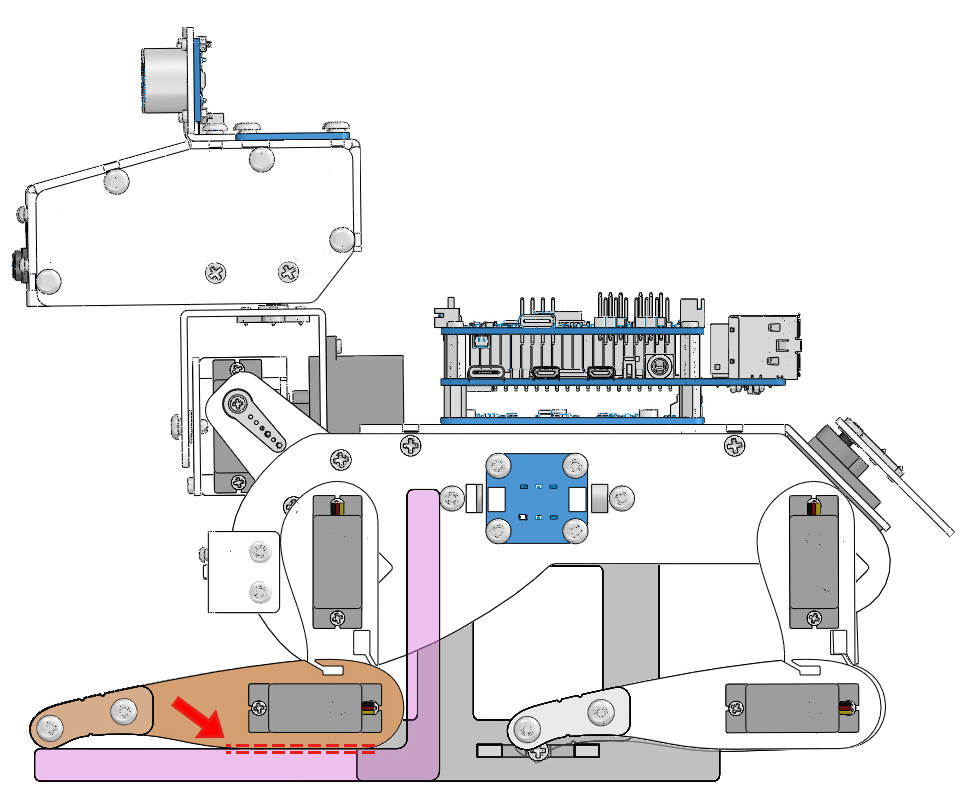
Wiederholen Sie diesen Kalibriervorgang für Servos 3 bis 8, um sicherzustellen, dass alle vier Beine des PiDog korrekt kalibriert sind.
Kalibrierung abschließen
Nachdem alle Servos kalibriert wurden, können Sie die Geh- oder Bewegungsbeispiele des PiDog erneut ausführen, um die Stabilität zu überprüfen.
Wenn eine Abweichung festgestellt wird, können Sie das Kalibrierungsprogramm erneut aufrufen, um Feinjustierungen vorzunehmen.
Es wird dringend empfohlen, diesen Schritt nach der ersten Montage durchzuführen, um einen stabilen Betrieb sicherzustellen.
Tipp
Um eine erneute Kalibrierung zu vermeiden, können Sie nach Abschluss der Kalibrierung die Servowinkel notieren oder die Konfigurationsdatei exportieren, um sie später schnell wiederherzustellen.