組合せ¶
したがって、このスマートカーは3つの異なる機能でスマートになる。しかし、1つのセンサーモジュールだけでは十分ではないと思っているか?それらのセンサーモジュールを1つに組み合わせてみてください!ここでは、実験を示す-参照用の障害物回避によるライトフォロー。
ライトフォロアを使用して車を走行させると、ライトを追うときに障害物にぶつかる場合がある。また、車を後退させるのはあまり便利ではない(ただし、配列が[1,0,1]である場合、車を後退させると設定したが、車が動いていて、ライトが時々正確にできない場合があるため、これらの値を取得することは難しい)。だから、板紙や足で車を後退させることもできるので、それがとても簡単である。
この例のプログラムを以下で確認してください。
まず、車のライトフォロアモジュールと超音波障害物回避モジュールを組み立てる。
ssh経由でコンピューターのRaspberry Piにログインし、ディレクトリに入る
cd ~/SunFounder_PiCar-S/example
コードを実行する。
python3 light_with_obsavoidance.py
動作原理¶
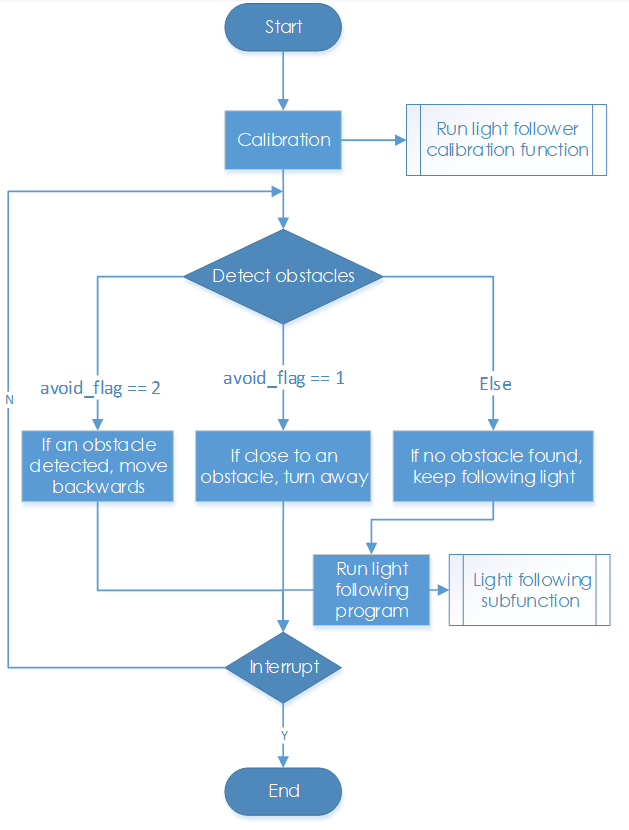
障害物回避をライトフォローよりも優先順位を高く設定する。車の前に障害物がある場合、障害物から離れて軌道に戻る。そうでない場合、車はライトを追従する。
車のライトフォローと障害物回避はセンサーモジュールに依存するため、2つのセンサーのステータスを個別に読み取る2つの関数を設定し、それらの関数から返されるフラグに値を割り当てる:state_light() と state_sonic()。
関数 state_sonic() は、戻り値は avoid_flag である。
車が障害物に 接近している 場合は、avoid_flag=2 を返す;
障害物に 近すぎる 場合は、avoid_flag = 1 を返す;
前方に障害物が 検出されない 場合は、avoid_flag = 0 を返す。
関数 state_light() では、戻り値は light_flag である。
ライトスポットが車の 前にある 場合、light_flag = 0 を返す;
スポットが 右側にある 場合、light_flag = 1 を返す;
スポットが 左側にある 場合、light_flag = 2 を返す;
スポットが 後ろにある 場合、light_flag = 3 を返す;
光点が検出されない 場合、light_flag = 4 を返す。
メインプログラム main() は、8avoid_flag と light_flag に従って対応するプログラムを実行し、avoid_flag は優先順位となっている。