補正¶
サーボを補正する¶
以前にサーボを90度に調整するコマンドを覚えているか?今回、他の2つのコマンドについて説明する。
2番目のコマンド front-wheel-test は、組み立て後に前輪が柔軟に回転できるかどうかをテストするために使用される。このコマンドを実行すると、左右に駆動する。
picar front-wheel-test
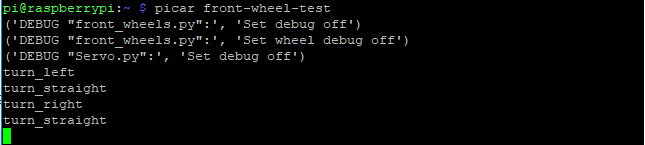
前輪がまっすぐな状態では、前輪の方向が正確に前を向いていない場合がある。フロントシャーシの真ん中の線から明らかなずれがある場合は、サーボを組み立て直して、もう一度 servo-instal を実行する。ほんの少しのずれ(約0〜15度のような)であるならば、ソフトウェアによって調整することができる。
SunFounder_PiCar/picar フォルダーを開く:
cd /home/pi/SunFounder_PiCar/picar
sudo nano config
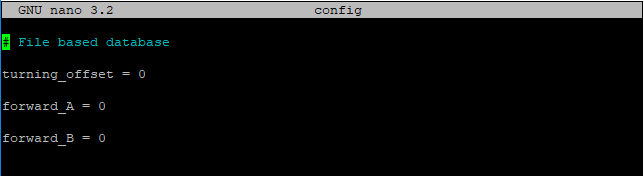
エディターでフォルダーの config ファイルを開く。いくつかのパラメーターが表示される。turning_offset の値は、前輪を調整するために使用される。デフォルトではその値は 0 となっている。前輪を 少し右に回したい 場合は、大きな値 に変更してください。左寄りにする には、小さい値 に設定する(負の数に設定できる)。
ただし、ホイールを過度に構成 DO NOT でください(-30〜30の推奨値)。そうしないと、サーボが動かなくなったり壊れたりする恐れがある。
Turning_offsetの値を変更した後、Ctrl+O を押して変更を保存し、Ctrl+X を押して終了する。picar servo-install コマンドを実行して、前輪のステータスを確認する。
picar servo-install
そして前輪が正面を向いていない場合は、ファイル config を数回編集する必要がある。通常3〜5回程度調整する必要がある。前輪の補正が完了したら、後輪の補正に進む。
モーターを補正する¶
2つのDCモーターの配線はランダムであるため、モーターのVCCとGNDがホイールに逆に接続され、コードで構成されているように車輪が逆方向に回転すべきときに、正面に回転してしまう場合がある。したがって、後輪を交互に加速と減速を同時に行う3番目のコマンドを使用できる。
picar rear-wheel-test
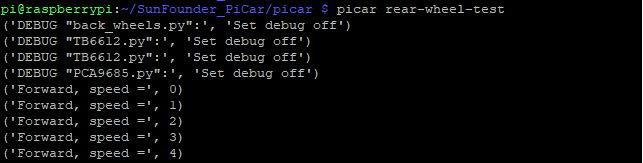
後輪の回転方向が画面と同じかどうかを確認してください。2つの車輪は2つのモーターによって別々に駆動されることに注意してください。一つが前方に回転し、もう一つが後方に回転する場合がある。その場合は、そのコマンドで逆回転する1つまたは両方のホイールを調整する必要がある。
cd /home/pi/SunFounder_PiCar/picar
sudo nano config
forward_A と forward_B は2つのモーターのデフォルトの回転方向を変更する。値は 0 または 1 のみで、時計回りと反時計回りの回転を表す。デフォルトでは、両方のパラメーターで 0 となっている。したがって、車輪が逆回転する場合は、ホイールの対応するパラメーターを 1 に変更するだけである。
Ctrl+O を押して変更を保存し、Ctrl+X を押して終了する。
コマンド picar Rear-wheel-test を再度実行して、コマンドに従って後輪が回転しているかどうかを確認する。
picar rear-wheel-test
config を PiCar-S の下のディレクトリの example にコピーする。
cp config ~/SunFounder_PiCar-S/example