注釈
SunFounderのRaspberry Pi & Arduino & ESP32愛好家Facebookコミュニティへようこそ!仲間の愛好家と一緒に、Raspberry Pi、Arduino、ESP32をより深く探求しましょう。
参加する理由
エキスパートサポート:コミュニティとチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換しましょう。
限定プレビュー:新製品の発表や先行公開にいち早くアクセスできます。
特別割引:最新製品を特別割引価格でご購入いただけます。
お祭りキャンペーンとプレゼント:プレゼント企画やホリデープロモーションに参加しましょう。
👉 一緒に探求し創造する準備はできましたか? [here] をクリックして今すぐ参加しましょう!
レッスン2 ロッカーボギーシステムを理解して作る
前回のレッスンでは、マーズローバーとその基本構造について学びました。マーズローバーの進化を見るときに気づく興味深い点の1つは、そのサスペンションシステムの一貫性です。技術の進歩にもかかわらず、ソジャーナからパーサヴィアランスまでのすべてのローバーは、ロッカーボギーシステムとして知られる同様のタイプのサスペンションシステムを使用して設計されています。
しかし、なぜロッカーボギーシステムにこだわるのでしょうか?この特定の設計は、火星探査にどのような利点をもたらすのでしょうか?
今日のレッスンでは、ロッカーボギーシステムの背後にある科学と工学についてさらに深く掘り下げ、実際に製作してみます。
このエキサイティングな工学の旅に出発しましょう!
学習目標
ロッカーボギーサスペンションシステムの設計原理とその利点を理解する。
ロッカーボギーサスペンションシステムの基本モデルを設計・製作する方法を学ぶ。
物理学の基本原則を応用して、ロッカーボギーサスペンションシステムがどのように複雑な地形を克服するかを説明する。
必要な材料
設計図と参考資料(NASAのマーズローバー設計図面や、ロッカーボギーサスペンションシステムの仕組みに関する動画など)
マーズローバー構造キット
基本工具と付属品(ドライバー、ネジなど)
手順
ステップ1: ロッカーボギーシステムを解き明かす
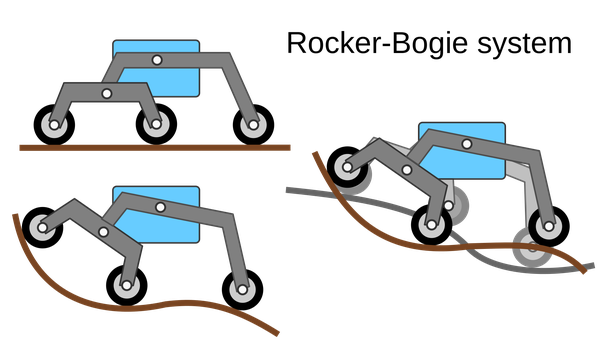
ロッカーボギーシステムは、機械の世界におけるマウンテンゴートのようなものです。起伏の多い岩場を移動する際に、ローバーのすべての車輪を地面に接地させ続けるように設計されています。急な坂道や大きな岩を含む、火星の予測不可能な景観に対応するために特別に作られています。このシステムはスプリングを使わず、代わりに6つの車輪の形状とその相互作用を活用して、困難な地形を克服します。これは、巧妙な機械設計がいかにして環境の障害を克服できるかを示す輝かしい例です。
このシステムの2つの主要部分、「ロッカー」と「ボギー」について詳しく見ていきましょう。
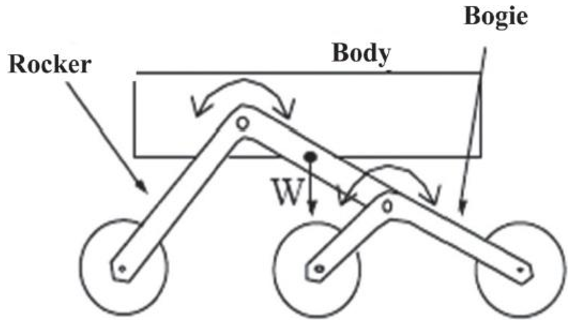
システムの「ロッカー」部分は、ローバーの車体の両側にある2つの大きな肢のようなものです。これらの肢(ロッカー)は、差動機構と呼ばれるメカニズムを通じて互いに、そしてローバーの車体(シャーシ)に接続されます。まるで2本の脚が歩くように、ロッカーはシャーシに対して反対方向に回転し、ほとんどの車輪が地面との接触を維持できるようにします。ローバーの車体は、両方のロッカーの平均角度を維持します。ロッカーの一端は車輪に接続され、もう一端はボギーに接続されます。
システムの「ボギー」部分は、ロッカーに取り付けられた小さな肢のようなものです。これはより小さなリンケージシステムで、中央でロッカーに旋回可能に取り付けられ、両端に車輪があります。
この基本的な理解をもとに、次の冒険のステップに進みましょう。
ステップ2: システムの動作を確認する
以下は、ロッカーボギーサスペンションシステムのユニークな特徴を示し、それがどのようにマーズローバーを困難な火星の地形で走行可能にするかを示すGIFです。
GIFを見た後は、話し合いをしましょう!これらの質問について考えてみてください:
なぜロッカーボギーサスペンションシステムが火星探査に適していると思いますか?
ロッカーボギーシステムがどのように機能するか、自分の言葉で説明できますか?
ロッカーボギーシステムのどのような特徴が、ローバーが不整地を走行するのに役立っていますか?
ロッカーボギーサスペンションシステムについての考えや洞察を自由に共有してください。
ステップ3: 製作する
ロッカーボギーシステムについて学んだところで、実際に自分たちで製作してみましょう。
必要な材料:
GalaxyRVRキット
ドライバーやレンチなどの基本工具
GalaxyRVRキットの組立説明書に記載された手順に従って、ローバーのサスペンションシステムを組み立ててください。
忍耐と正確さがここでは不可欠です。すべての部品を正しく配置し、しっかりと固定してください。
その間、組み立てている各コンポーネントの設計と機能について、仲間と話し合ってみてください。これは設計の理解だけでなく、火星探査におけるその実用的な応用を理解するのにも役立ちます。
組み立てやテスト中に問題が発生しても心配しないでください。これもすべてエンジニアリングプロセスの一部です!問題をトラブルシューティングすることは、私たちが学び、革新する方法です。
ステップ4: まとめと振り返り
サスペンションシステムの組み立て中に、すべての可動部品がセルフロックナットを使用していることに気づきましたか?なぜだと思いましたか?

セルフロックナットは、通常のナットの内部にゴムリングが含まれているタイプの留め具です。この設計により、組み立てられた部品が動作中の振動によって簡単に緩んで外れることがありません。
さらに、部品が一定の範囲内で回転できるようにもなります。
そのため、組み立て時には、まずソケットとドライバーでネジとセルフロックナットを締め、その後少し緩めます。これにより、部品間に自由な回転の余地が確保され、かつ緩すぎない状態が保証されます。
このレッスンでは、ロッカーボギーシステムについて学んだだけでなく、実際に自分たちで製作しました。さらに、それがどのようにマーズローバーを様々な起伏の多い地形でスムーズに移動させるかを手動でシミュレートすることもできます。
この知識と経験を身につけて、私たちは火星探査の未知の領域にさらに深く踏み込む準備が整いました。赤い惑星の謎を解き明かし続けましょう。