Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
1.3.2 Servo
Einführung
In dieser Lektion lernen wir, wie man das Servo dreht.
Komponenten
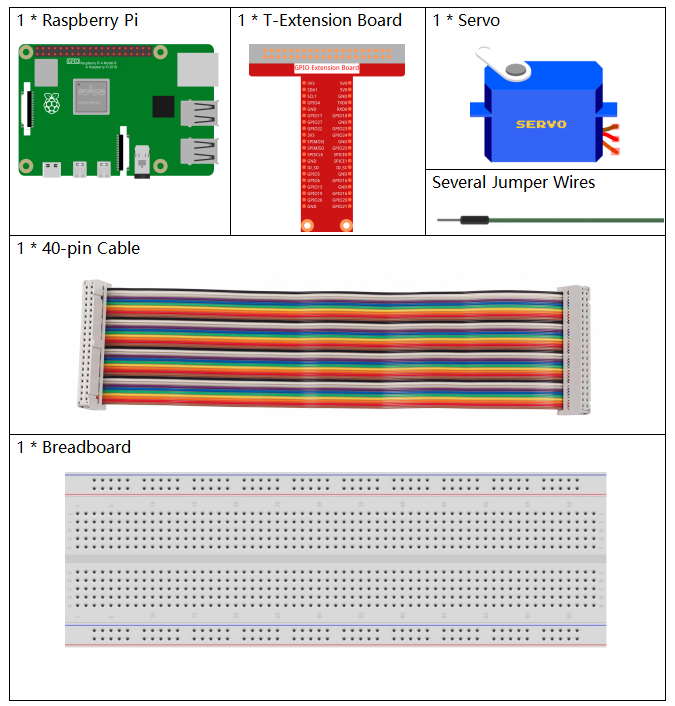
Prinzip
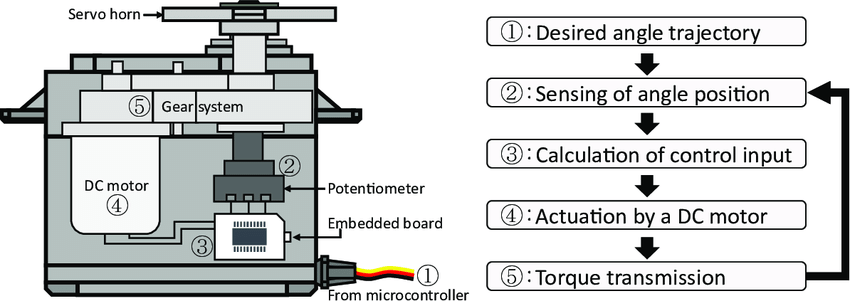
Servo
Ein Servo besteht im Allgemeinen aus folgenden Teilen: Gehäuse, Welle, Getriebe, Potentiometer, Gleichstrommotor und eingebettete Platine.

Das funktioniert so: Der Mikrocontroller sendet PWM-Signale an das Servo, und dann empfängt die im Servo eingebettete Karte die Signale über den Signal Pin und steuert den Motor im Inneren, um sich zu drehen. Infolgedessen treibt der Motor das Zahnradsystem an und motiviert dann die Welle nach dem Abbremsen. Die Welle und das Potentiometer des Servos sind miteinander verbunden. Wenn sich die Welle dreht, treibt sie das Potentiometer an, sodass das Potentiometer ein Spannungssignal an die eingebettete Platine ausgibt. Dann bestimmt das Board die Richtung und Geschwindigkeit der Drehung basierend auf der aktuellen Position, so dass es genau an der richtigen Position wie definiert anhalten und dort halten kann.
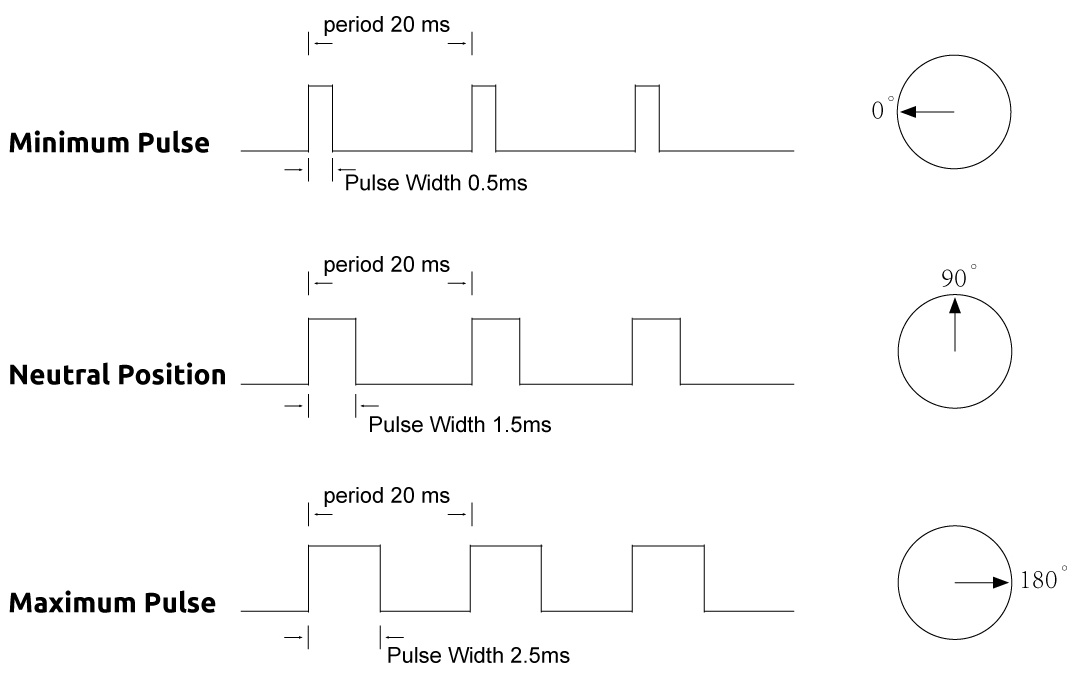
Der Winkel wird durch die Dauer eines Impulses bestimmt, der an den Steuerdraht angelegt wird. Dies wird als Pulsweitenmodulation bezeichnet. Das Servo erwartet alle 20 ms einen Impuls. Die Länge des Impulses bestimmt, wie weit sich der Motor dreht. Zum Beispiel bringt ein Impuls von 1,5 ms den Motor in die 90-Grad-Position (neutrale Position).
Wenn ein Impuls an ein Servo gesendet wird, das weniger als 1,5 ms beträgt, dreht sich das Servo in eine Position und hält seine Ausgangswelle einige Grad gegen den Uhrzeigersinn vom Neutralpunkt entfernt. Wenn der Impuls breiter als 1,5 ms ist, tritt das Gegenteil auf. Die minimale Breite und die maximale Impulsbreite, die das Servo anweisen, sich in eine gültige Position zu drehen, sind Funktionen jedes Servos. Im Allgemeinen ist der minimale Impuls ungefähr 0,5 ms breit und der maximale Impuls ist 2,5 ms breit.
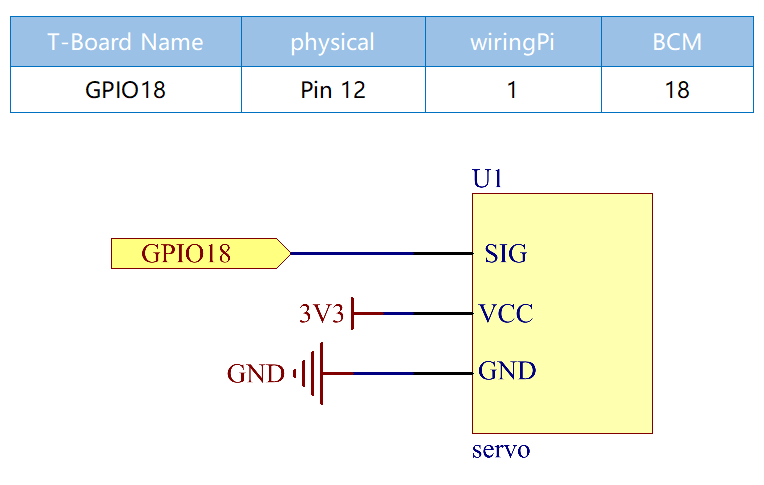
Schematische Darstellung
Experimentelle Verfahren
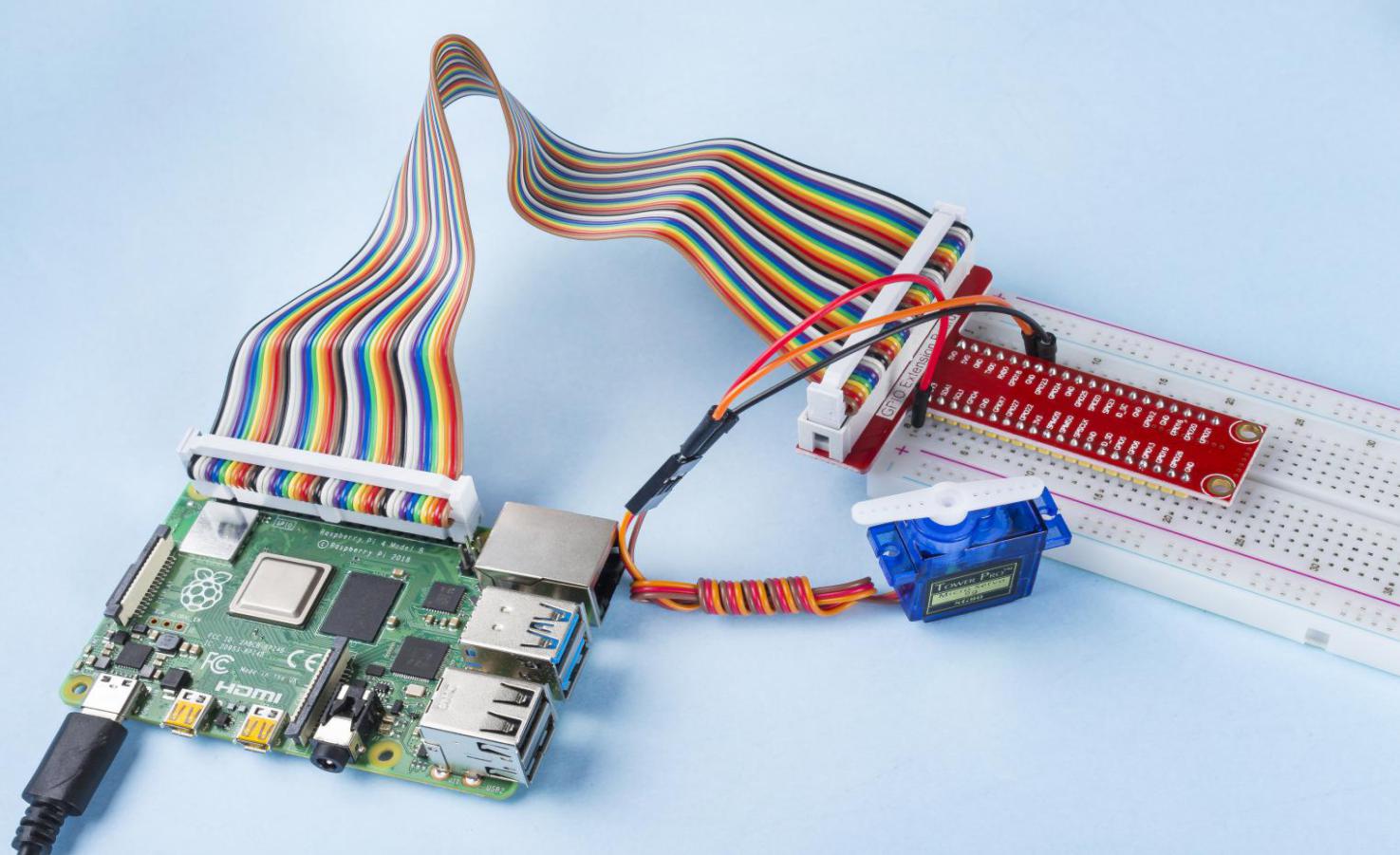
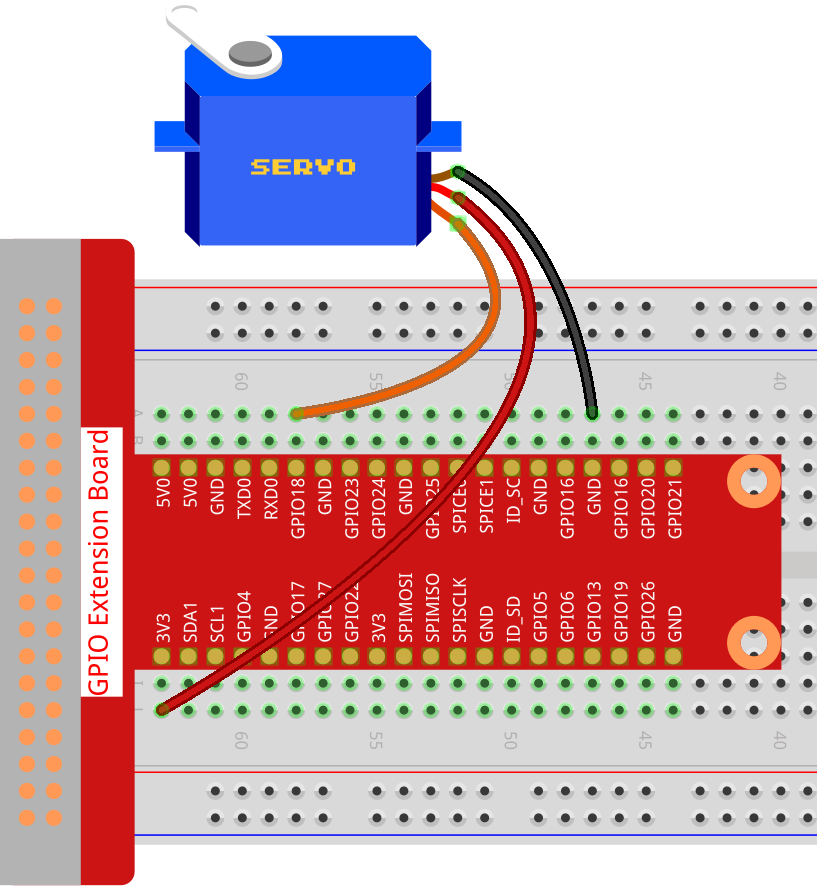
Schritt 1: Bauen Sie die Schaltung auf.
Für Benutzer in C-Sprache
Schritt 2: Gehen Sie zum Ordner des Codes.
cd ~/davinci-kit-for-raspberry-pi/c/1.3.2
Schritt 3: Kompilieren Sie den Code.
gcc 1.3.2_Servo.c -lwiringPi
Schritt 4: Führen Sie die ausführbare Datei aus.
sudo ./a.out
Nachdem das Programm ausgeführt wurde, dreht sich das Servo kreisförmig von 0 Grad auf 180 Grad und dann von 180 Grad auf 0 Grad.
Code
#include <wiringPi.h>
#include <softPwm.h>
#include <stdio.h>
#define ServoPin 1 //define the servo to GPIO1
long Map(long value,long fromLow,long fromHigh,long toLow,long toHigh){
return (toHigh-toLow)*(value-fromLow) / (fromHigh-fromLow) + toLow;
}
void setAngle(int pin, int angle){ //Create a funtion to control the angle of the servo.
if(angle < 0)
angle = 0;
if(angle > 180)
angle = 180;
softPwmWrite(pin,Map(angle, 0, 180, 5, 25));
}
int main(void)
{
int i;
if(wiringPiSetup() == -1){ //when initialize wiring failed,print message to screen
printf("setup wiringPi failed !");
return 1;
}
softPwmCreate(ServoPin, 0, 200); //initialize PMW pin of servo
while(1){
for(i=0;i<181;i++){ // Let servo rotate from 0 to 180. setAngle(ServoPin,i);
delay(2);
}
delay(1000);
for(i=181;i>-1;i--){ // Let servo rotate from 180 to 0. setAngle(ServoPin,i);
delay(2);
}
delay(1000);
}
return 0;
}
Code Erklärung
long Map(long value,long fromLow,long fromHigh,long toLow,long toHigh){
return (toHigh-toLow)*(value-fromLow) / (fromHigh-fromLow) + toLow;
}
Erstellen Sie eine Map() - Funktion, um den Wert im folgenden Kode zuzuordnen.
void setAngle(int pin, int angle){ //Create a funtion to control the angle of the servo.
if(angle < 0)
angle = 0;
if(angle > 180)
angle = 180;
softPwmWrite(pin,Map(angle, 0, 180, 5, 25));
}
Erstellen Sie eine Funktion, setAngle() , um den Winkel zum Servo zu schreiben.
softPwmWrite(pin,Map(angle,0,180,5,25));
Diese Funktion kann das Einschaltdauer der PWM ändern.
Damit sich das Servo auf 0 bis 180° dreht,
sollte sich die Impulsbreite im Bereich von 0,5 ms bis 2,5 ms ändern,
wenn die Periode 20 ms beträgt. In der Funktion softPwmCreate() haben wir festgelegt,
dass der Zeitraum 200x100us = 20ms beträgt. Daher müssen wir 0 ~ 180 bis 5x100us ~ 25x100us zuordnen.
Der Prototyp dieser Funktion ist unten dargestellt.
int softPwmCreate(int pin,int initialValue,int pwmRange);
pin: Jeder GPIO-Pin von Raspberry Pi kann als PWM-Pin gesetzt werden.
initialValue: Die anfängliche Impulsbreite ist der initialValue mal 100us.
pwmRange: Die Periode von PWM ist die pwmRange mal 100us.
Für Python-Sprachbenutzer
Schritt 2: Gehen Sie zum Ordner des Codes.
cd ~/davinci-kit-for-raspberry-pi/python/
Schritt 3: Führen Sie die ausführbare Datei aus.
sudo python3 1.3.2_Servo.py
Nachdem das Programm ausgeführt wurde, dreht sich das Servo kreisförmig von 0 Grad auf 180 Grad und dann von 180 Grad auf 0 Grad.
Code
Bemerkung
Sie können den folgenden Code Ändern/Zurücksetzen/Kopieren/Ausführen/Stoppen . Zuvor müssen Sie jedoch zu einem Quellcodepfad wie davinci-kit-for-raspberry-pi/python gehen.
import RPi.GPIO as GPIO
import time
SERVO_MIN_PULSE = 500
SERVO_MAX_PULSE = 2500
ServoPin = 18
def map(value, inMin, inMax, outMin, outMax):
return (outMax - outMin) * (value - inMin) / (inMax - inMin) + outMin
def setup():
global p
GPIO.setmode(GPIO.BCM) # Numbers GPIOs by BCM
GPIO.setup(ServoPin, GPIO.OUT) # Set ServoPin's mode is output
GPIO.output(ServoPin, GPIO.LOW) # Set ServoPin to low
p = GPIO.PWM(ServoPin, 50) # set Frequecy to 50Hz
p.start(0) # Duty Cycle = 0
def setAngle(angle): # make the servo rotate to specific angle (0-180 degrees)
angle = max(0, min(180, angle))
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)#map the angle to duty cycle and output it
def loop():
while True:
for i in range(0, 181, 5): #make servo rotate from 0 to 180 deg
setAngle(i) # Write to servo
time.sleep(0.002)
time.sleep(1)
for i in range(180, -1, -5): #make servo rotate from 180 to 0 deg
setAngle(i)
time.sleep(0.001)
time.sleep(1)
def destroy():
p.stop()
GPIO.cleanup()
if __name__ == '__main__': #Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the program destroy() will be executed.
destroy()
Code Erklärung
p = GPIO.PWM(ServoPin, 50) # set Frequecy to 50Hz
p.start(0) # Duty Cycle = 0
Stellen Sie den ServoPin auf den PWM-Pin, dann die Frequenz auf 50 Hz und die Periode auf 20 ms.
p.start(0) : Führen Sie die PWM-Funktion, und setzen Sie den Anfangswert auf 0.
def setAngle(angle): # make the servo rotate to specific angle (0-180 degrees)
angle = max(0, min(180, angle))
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)#map the angle to duty cycle and output it
Erstellen Sie eine Funktion, setAngle() , um einen Winkel von 0 bis 180 in das Servo zu schreiben.
angle = max(0, min(180, angle))
Diese Kode wird verwendet, um den Winkel im Bereich von 0 bis 180° zu begrenzen.
Die Funktion min() gibt das Minimum der Eingabewerte zurück. Wenn 180 <Winkel, then 180 zurückgeben, wenn nicht, Winkel zurückgeben .
Die max() -Methode gibt das maximale Element in einem iterierbaren oder größten von zwei oder mehr Parametern zurück. Wenn 0> Winkel, dann 0 zurückgeben, wenn nicht, Winkel zurückgeben.
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)
Um einen Bereich von 0 bis 180° zum Servo zu rendern, wird die Impulsbreite des Servos auf 0,5 ms (500 us) bis 2,5 ms (2500 us) eingestellt.
Die Periode der PWM beträgt 20 ms (20000us), daher beträgt das Tastverhältnis der PWM (500/20000)% - (2500/20000)%, und der Bereich 0 bis 180 wird auf 2.5 bis 12.5 abgebildet.
Phänomen Bild