注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
APPによる制御
Zeus Carをモバイルデバイスから制御するには、デバイスにAPP(SunFounder Controller)をダウンロードし、Zeus CarのLANに接続し、APP上で独自のコントローラーを作成する必要があります。
速攻ガイド
これは簡単なチュートリアル動画です。まず動画をご覧いただき、その後に以下の指示に従ってください。
Zeus Carを起動しましょう。
初めて使用する場合、またはバッテリーケーブルが外された場合、Zeus Car Shieldは過放電保護回路を作動させます。
このため、Type-Cケーブルを約5秒間接続する必要があります。
電源インジケーターが点灯した場合、保護状態が解除されたことを意味します。このときバッテリーインジケーターが両方ともオフになっている場合は、引き続きType-Cケーブルを接続してバッテリーを充電してください。
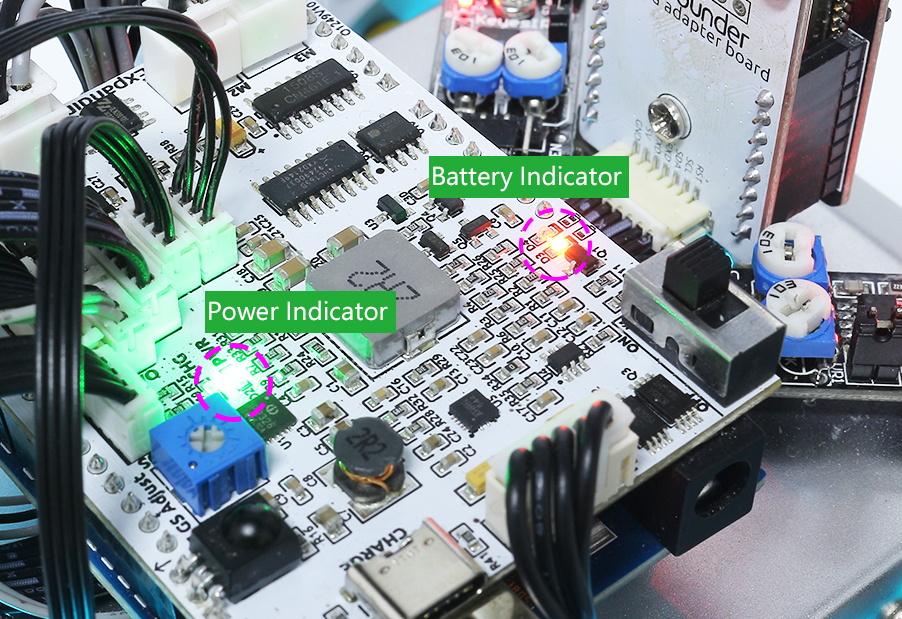
次に、小さなスイッチを右側に倒して、車とESP32 CAMの通信を確立します。その後、リセットボタンを押してコードを再起動します。この時点で、車体の下部ライトがオレンジからライトブルーに変わるのが確認できます。
APP Store(iOS) または Google Play(Android) から SunFounder Controller をインストールします。
Zeus_CarWLANに接続します。次に、Zeus Carが放送するローカルエリアネットワーク(LAN)にモバイルデバイスを接続します。これにより、モバイルデバイスとZeus Carが同じネットワーク上に配置され、モバイルデバイスのアプリケーションとZeus Car間の通信が容易になります。
モバイル端末(タブレット)のWLANで
Zeus_Carを見つけ、パスワード12345678を入力して接続します。注釈
現在の接続はGalaxyRVRホットスポットへの接続であり、インターネットアクセスはありません。ネットワークを切り替えるように促された場合は、「接続を維持」を選択してください。
コントローラーを作成します。
SunFounder Controllerでコントローラーを追加するには、 + アイコンをクリックします。

一部の製品にはプリセットコントローラーが用意されています。ここでは Zeus Car を選択します。名前を入力するか、単に Confirm をタップします。

アプリ内に入ると、Zeus Carを自動的に検索します。しばらくすると、「接続成功」と表示されるプロンプトが表示されます。

次に、
 ボタンをタップすると、カメラのライブ映像を表示し、提供されたウィジェットを使用して車を制御できます。
ボタンをタップすると、カメラのライブ映像を表示し、提供されたウィジェットを使用して車を制御できます。
以下はウィジェットの機能一覧です。
Calibration(E): コンパスのキャリブレーションを開始。
Stop(F): 車の動きを全て停止。
Reset Heading(G): 手で車を一つの方向に向けて配置した後、このウィジェットをクリックすることで、その方向を車の移動の前方として設定します。これにより、他のウィジェットで車をゆっくりその方向に回転させる代わりに、迅速に方向を指定できます。
Speech(I): 音声制御モードに切り替え。
Drift Enable(J): ドリフト機能を有効にする。
Move in All Directions(K): 車を全方向に移動させるための制御。
Line Track: 下記の2つのウィジェットは、ライントラックモードに切り替えることができます。
Line no Mag(M): ライントラックモードに切り替えるが、磁場の影響を受けない。ライントラッキングの過程で、Zeus Carの方向は継続的に変わります。
Line(N): ライントラックモードに切り替えると、磁場の存在のため、ライントラッキング中のZeus Carの方向は特定の方向に向けられます。
Follow(O): フォローモードに切り替え。
Avoid(P): 障害物回避モードに切り替え。
Control the Drection(Q): 頭部の方向を制御するために使用。
Calibration(E)
 ボタンをクリックしてコンパスのキャリブレーションをオンにします。
ボタンをクリックしてコンパスのキャリブレーションをオンにします。
Zeusカーを地上に置きます。コンパスのキャリブレーションをオンにすると、車は反時計回りに回転を開始し、約1分で停止します。2分以上回転する場合は、こちらの磁場が複雑です。場所を変更して再度キャリブレーションしてください。
Drift Enable(J)
 ボタンをクリックして、ドリフト機能を有効にします。
ボタンをクリックして、ドリフト機能を有効にします。
 ウィジェットを反時計回りにスライドすると、Zeus Carが右にドリフトします。手を離すと、車は現在の位置で停止します。
ウィジェットを反時計回りにスライドすると、Zeus Carが右にドリフトします。手を離すと、車は現在の位置で停止します。
同様に、
ウィジェットを時計回りにスライドすると、Zeus Carは左にドリフトし、現在の位置で停止します。
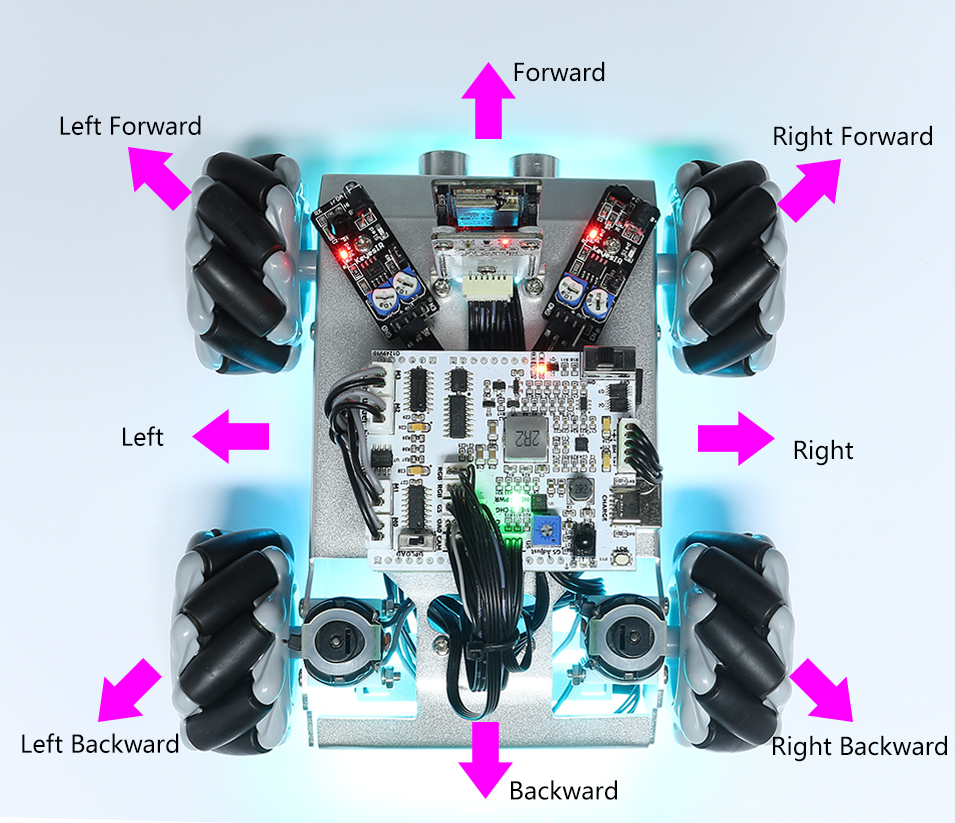
Move in All Directions(K)
 ウィジェットをスワイプすると、Zeus Carは適切な方向に移動します。
ウィジェットをスワイプすると、Zeus Carは適切な方向に移動します。
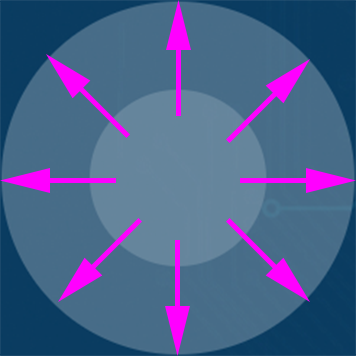
一度スライドすると車が動きますので、常に手を離さない限り、車は移動し続けます。
Speech(I)
 ウィジェットを押すことで、STT機能が有効になります。STTとは、Speech to Textの略です。
ウィジェットを押すことで、STT機能が有効になります。STTとは、Speech to Textの略です。
SunFounder Controllerアプリは、モバイルデバイスの音声認識エンジンと統合されています。したがって、SunFounder Controllerで Speech(I) ウィジェットをタップして長押しし、モバイルデバイスに向かって話すと、
デバイスはあなたの発話をキャプチャし、テキストに変換し、Zeus Carに送信します。このテキストがコード内の事前設定されたコマンドと一致する場合、車は対応するアクションを実行します。
以下は、コード内で現在プリセットされているコマンドです。次のコマンドのいずれかを話し、Zeus Carがどのように反応するかを観察してください。
stop: 車の動きをすべて停止できます。pasue: この機能はStopと基本的に同じですが、車の頭部が元々設定された方向を向いていない場合、設定された方向にゆっくりと動きます。forwardbackwardleft forwardleft backwardright forwardright backwardmove leftmove right
注釈
STT(Speech to Text)機能を使用するには、Androidデバイスでのインターネット接続とGoogleサービスが必要です。しかし、Zeus Carの事前設定されたAP(Access Point)モードでは動作しません。
APモードでは、Zeus Carはモバイルデバイスが接続できるローカルWi-Fiネットワークを作成しますが、インターネットアクセスは提供されません。
AndroidでSTT機能を使用するには、AndroidデバイスでSTT機能を使用する方法は? に従って車のコードをAPモードからSTAモードに切り替えてください。
注釈
iOSデバイスは、オフラインの音声認識エンジンを使用しているため、APモードとSTAモードの両方で問題なく動作します。
上記の8つのコマンドを車が受信した後、 stop または pasue のコマンドを受信するまで、対応する方向に移動し続けます。
turn left: このコマンドを使用すると、車は本体を中心に45°左に回転し、前の状態に基づいて前進するか停止します。前の状態が停止の場合は、45°左に回転した後に停止します;前進の場合は、回転した後に前進します。
turn right: このコマンドを使用すると、車は本体を中心に45°右に回転し、前の状態によって前進するか停止します。
Line Track
 ウィジェットをクリックしてライン追跡モードに切り替えます。
ウィジェットをクリックしてライン追跡モードに切り替えます。
Zeus Carには、移動の方向を常に向いているモードと、頭が固定の方向を向いているモードの、2つのライン追跡モードがあります。ここでは、後者が選択されています。
3cm幅のラインを貼る
Omniグレースケールモジュールには8つのセンサーがあり、各センサー間の距離は2cmから3cmです。ブラックラインを同時に検出するためには、2つのセンサーが必要です。したがって、貼るラインは少なくとも3cmの幅が必要であり、曲がる角度は90°未満であってはなりません。

Omniグレースケールモジュールをキャリブレートする。
各サブフロアは異なるグレースケール値を持っているため、工場で設定された閾値は現在の環境に適していない場合があります。そのため、使用する前にこのモジュールをキャリブレートする必要があります。床の色が大きく変わった場合は、キャリブレーションを再度行うことを推奨します。
Zeus Carを白い表面に置き、灰色のセンサーの光がちょうど点灯するまでポテンショメーターを回します。

それから、二つのグレースケールセンサーを、ブラックラインと白い表面の間にちょうど配置し、信号インジケータがちょうど消えるまでゆっくりとポテンショメーターを回します。

グレースケールセンサーの光が、ブラックラインと白い表面の間にあるときに消灯し、白い表面にあるときに点灯することを確認するために、ブラックラインと白い表面の上を何度も動かすことができます。これは、モジュールが正常にキャリブレーションされたことを示しています。
Zeus Carを貼ったラインの上に置き、
ウィジェットをクリックすると、ラインを追跡します。Omniグレースケールモジュールの環境要件が高いため、追跡効果が満足できない場合(脱線)は、何度もキャリブレートすることを推奨します。
Follow(O)
 ウィジェットをクリックして、フォローモードに切り替えます。
ウィジェットをクリックして、フォローモードに切り替えます。
超音波センサーは前方(20 cm)の障害物を検出し、それらを追尾します。これら二つの障害物回避モジュールは車が左または右に追尾することを可能にしますが、使用前に(15cm)でキャリブレートする必要があります。
IR障害物回避モジュールをキャリブレートする。
右の障害物回避モジュールの調整から始めます。輸送中の衝突により、赤外線モジュールの送信機と受信機が傾くことがあります。したがって、手動でそれらをまっすぐに調整する必要があります。
IR障害物回避モジュールから約15cm離れた場所に障害物を置きます。
モジュールには2つのポテンショメータがあります。一つは送信電力を調整するためのもの、もう一つは送信周波数を調整するためのものです。これらのポテンショメータを調整することで、検出距離を調整することができます。
その後、ポテンショメータを調整し、15cmでモジュールの信号灯が点灯する場合は調整が成功していると言えます。そうでない場合は、もう一つのポテンショメータを調整します。

同じ方法で他の障害物回避モジュールをキャリブレートします。
Zeus車をテーブルや地面に置き、あなたの手や他の障害物を追跡させます。
Avoid(P)
障害物回避モードに入る場合は、  ウィジェットをクリックしてください。ただし、2つの障害物回避モジュールをキャリブレートする前に、Follow(O) を参照してください。
ウィジェットをクリックしてください。ただし、2つの障害物回避モジュールをキャリブレートする前に、Follow(O) を参照してください。
Zeus車は前進します。
超音波モジュールは前方の障害物を検出します。検出された場合、車は左に回転します。
左の障害物回避モジュールが障害物を検出すると、車は右に回転し、右の障害物回避モジュールが障害物を検出すると、車は左に回転します。
Control the Drection(Q)
- ボタンがオンの場合、 ウィジェットはZeus Carを左右にドリフトさせるために使用されます。
- ウィジェットがオフの場合、 ウィジェットは車の頭の方向を制御するために使用されます。
- ウィジェットを反時計回りにスライドすると、車も反時計回りに回転します。手を離すと、車の頭は元の方向に戻ります。
同様に、
ウィジェットで車は時計回りに回転し、手を放すと元の方向に戻ります。