Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
Control Servos and Motors
In this project, we have 12 servos and two motors working simultaneously.
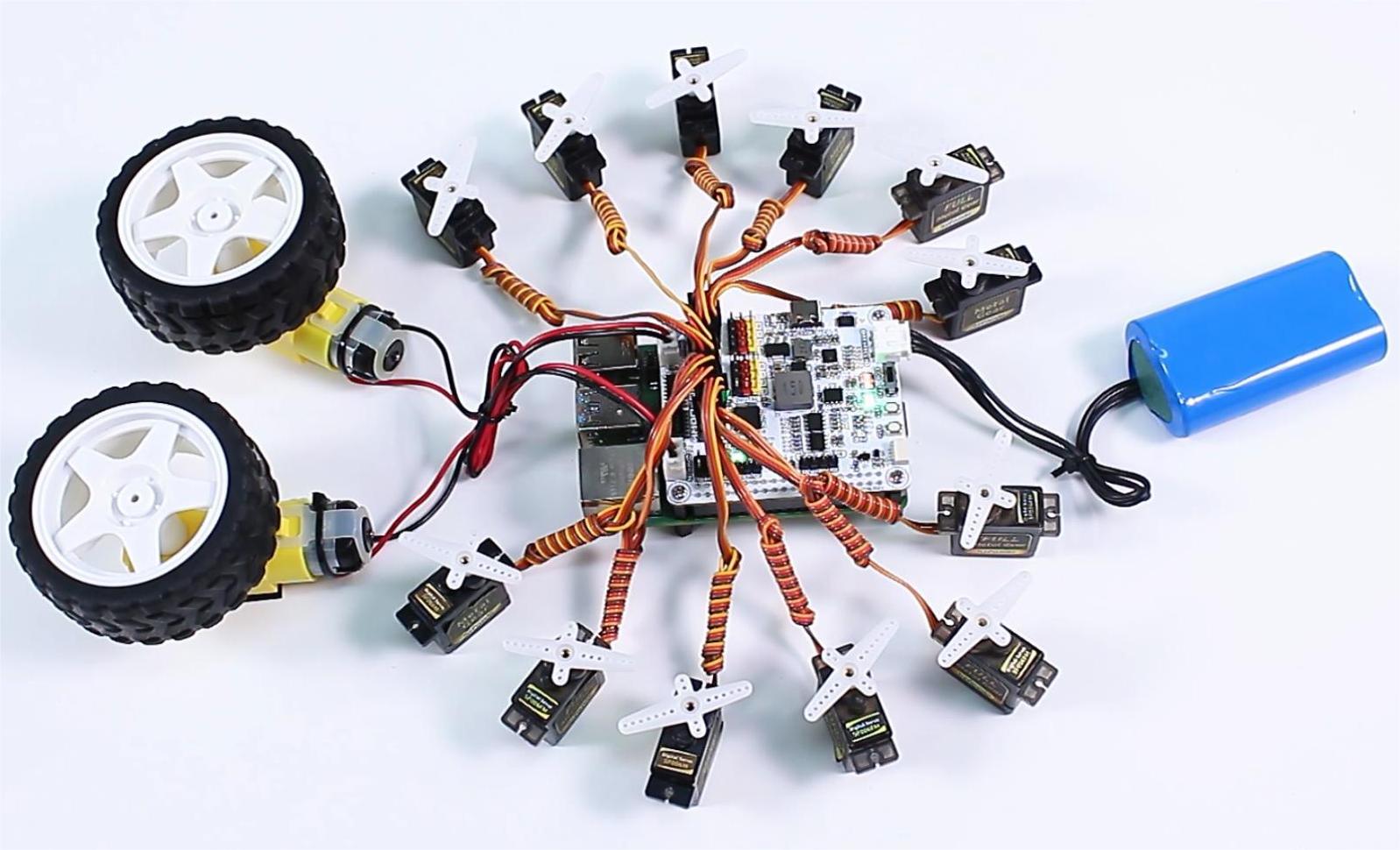
However, it’s important to note that if your servos and motors have a high starting current, it’s recommended to start them separately to avoid insufficient power supply current, which could lead to the Raspberry Pi restarting.
Code
from robot_hat import Servo, Motors
import time
# Create objects for 12 servos
servos = [Servo(f"P{i}") for i in range(12)]
# Create motor object
motors = Motors()
def initialize_servos():
"""Set initial angle of all servos to 0."""
for servo in servos:
servo.angle(-90)
time.sleep(0.1) # Wait for servos to reach the initial position
time.sleep(1)
def sweep_servos(angle_from, angle_to, step):
"""Control all servos to sweep from a start angle to an end angle."""
if angle_from < angle_to:
range_func = range(angle_from, angle_to + 1, step)
else:
range_func = range(angle_from, angle_to - 1, -step)
for angle in range_func:
for servo in servos:
servo.angle(angle)
time.sleep(0.05)
def control_motors_and_servos():
"""Control motors and servos in synchronization."""
try:
while True:
# Motors rotate forward and servos sweep from -90 to 90 degrees
motors[1].speed(80)
time.sleep(0.01)
motors[2].speed(80)
time.sleep(0.01)
sweep_servos(-90, 90, 5)
time.sleep(1)
# Motors rotate backward and servos sweep from 90 to -90 degrees
motors[1].speed(-80)
time.sleep(0.01)
motors[2].speed(-80)
time.sleep(0.01)
sweep_servos(90, -90, 5)
time.sleep(1)
except KeyboardInterrupt:
# Stop motors when Ctrl+C is pressed
motors.stop()
print("Motors stopped.")
# Initialize servos to their initial position
initialize_servos()
# Control motors and servos
control_motors_and_servos()