2. Speed Calculation¶
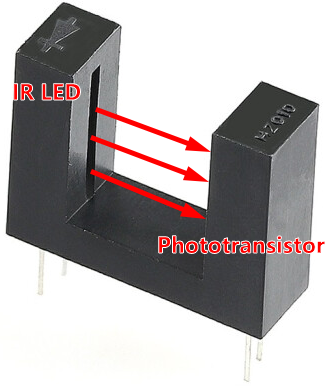
As described in 1. Introduce Speed Module, the speed module’s speed measurement principle is to count the number of times the infrared light pass through the encode disk per unit time.
Note
The complete script
speed_2_get_speed.pyis in the pathpico_4wd_car\examples\learn_modules.Before running the following scripts, it is recommended to hang the car in the air so that the 4 wheels can turn freely.
Here are the steps to implement the speed calculation, which you can copy into Thonny to run.
1. Counting
Let’s count how many times the infrared rays pass through the encode disk in a minute.
from machine import Timer, Pin def on_left(ch): global left_count left_count += 1 def on_timer(ch): global left_count print(left_count) left_count = 0 # Interrupter, used to count left_count = 0 left_pin = Pin(8, Pin.IN, Pin.PULL_UP) left_pin.irq(trigger=Pin.IRQ_FALLING, handler=on_left) # Timer, print count every 1000ms tim = Timer() tim.init(period=1000, mode=Timer.PERIODIC, callback=on_timer) # motor run import motors import time try: while True: # for i in range(20,100,10): motors.move("forward",50) # time.sleep(1) finally: motors.stop() time.sleep(0.2)Copy the above code into Thonny and click the
button or press
F5to run it.After powering up the Pico 4WD car, you will see the 4 motors turning (forward) while seeing the count in the Shell.
2. Calculate the RPM
Now let’s calculate the RPM based on the counts. To improve the accuracy of the calculation, the calculation period is set to 200ms.
from machine import Timer, Pin import math duration = 200 def on_left(ch): global left_count left_count += 1 def on_timer(ch): global left_count # revolutions per second times = left_count * 1000 /duration rps=times/20.0 print(rps) # clear count left_count = 0 # Interrupter, used to count left_count = 0 left_pin = Pin(8, Pin.IN, Pin.PULL_UP) left_pin.irq(trigger=Pin.IRQ_FALLING, handler=on_left) # Timer, print speed tim = Timer() tim.init(period=duration, mode=Timer.PERIODIC, callback=on_timer) # motor run import motors import time try: while True: for i in range(20,100,10): motors.move("forward",i) time.sleep(1) finally: motors.stop() time.sleep(0.2)After running the script, click View -> Plotter to view the RPM curve, and you can see that the higher the power, the faster the RPM.
3. Calculate moving speed
Next, the RPM is converted to moving speed (unit:cm/s). Here the moving speed is actually the RPM multiplied by the circumference of the wheel.
from machine import Timer, Pin import math WP = 2 * math.pi * 3.3 # wheel_perimeter(cm): 2 * pi * r duration = 200 def on_left(ch): global left_count left_count += 1 def on_timer(ch): global left_count # revolutions per second rps = left_count * 1000 /duration /20.0 # speed speed = rps * WP print(speed) # clear count left_count = 0 # Interrupter, used to count left_count = 0 left_pin = Pin(8, Pin.IN, Pin.PULL_UP) left_pin.irq(trigger=Pin.IRQ_FALLING, handler=on_left) # Timer, print speed tim = Timer() tim.init(period=duration, mode=Timer.PERIODIC, callback=on_timer) # motor run import motors import time try: while True: for i in range(20,100,10): motors.move("forward",i) time.sleep(1) finally: motors.stop() time.sleep(0.2)
4. Calculate the speed on both sides
In the case of a turn, there may be a situation where one side of the wheel is not rotating, but the car is actually moving. Then we can use both sides of the speed module to reduce error.
from machine import Timer, Pin
import math
WP = 2 * math.pi * 3.3 # wheel_perimeter(cm): 2 * pi * r
duration = 200
def on_left(ch):
global left_count
left_count += 1
def on_right(ch):
global right_count
right_count += 1
def on_timer(ch):
global left_count,right_count
# revolutions per second
rps = (left_count + right_count) * 1000 /duration /20.0 /2
# speed
speed = rps * WP
print(speed)
# clear count
left_count = 0
right_count = 0
# Interrupter, used to count
left_count = 0
right_count = 0
left_pin = Pin(8, Pin.IN, Pin.PULL_UP)
left_pin.irq(trigger=Pin.IRQ_FALLING, handler=on_left)
right_pin = Pin(9, Pin.IN, Pin.PULL_UP)
right_pin.irq(trigger=Pin.IRQ_FALLING, handler=on_right)
# Timer, print speed
tim = Timer()
tim.init(period=duration, mode=Timer.PERIODIC, callback=on_timer)
# motor run
import motors
import time
try:
while True:
for i in range(20,100,10):
motors.move("forward",i)
time.sleep(1)
finally:
motors.stop()
time.sleep(0.2)