2.Grayscale Detection¶
This project will teach us how to read the grayscale module values and determine whether the Pico 4WD detects a line will cliff based on those values.
With the previous section 1. Introduce Grayscale Module, you can know that the value on the white surface > black line > cliff.
Code
You will see that if you hang the Pico 4WD car in the air, the Shell will print “Danger!”. If the grayscale module detects a black line, True will be printed. On white surfaces, False will be printed.
from machine import Pin, ADC
import time
gs0 = ADC(Pin(26))
gs1 = ADC(Pin(27))
gs2 = ADC(Pin(28))
edge_ref = 1000 # edge_reference
line_ref = 10000 # line_reference
def get_value():
return [gs0.read_u16(), gs1.read_u16(), gs2.read_u16()]
def is_on_edge():
gs_list = get_value()
for value in gs_list:
if value<=edge_ref:
return True
return False
def get_line_status():
gs_list = get_value()
line_status=[]
for value in gs_list:
line_status.append(value<line_ref)
return line_status
while True:
print(get_value())
time.sleep(0.2)
if is_on_edge():
print("Danger!")
else:
print(get_line_status())
What’s More
Note that edge_ref and line_ref are the cliff and line threshold set according to my current environment, what you actually use may be different.
You need to get them by following these steps.
Copy the above code into Thonny or open the
grayscale_2_get_value.pyunder the path ofpico_4wd_car-v2.0\examples\learn_modules.To run the script, click the
 button or press
button or press F5.After powering up the Pico 4WD car, place the grayscale module in three environments: white, black and hanging in the air (10cm or more) to see how the data in the Shell changes (keeping the USB cable connected to the computer).
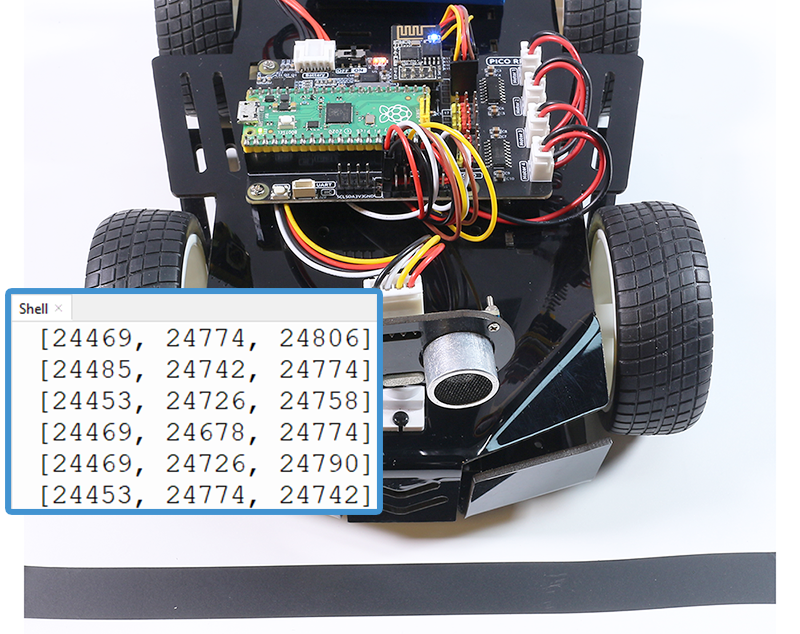
- White surface
You will find that the value of the white surface is generally large, for example mine is around 240,000.
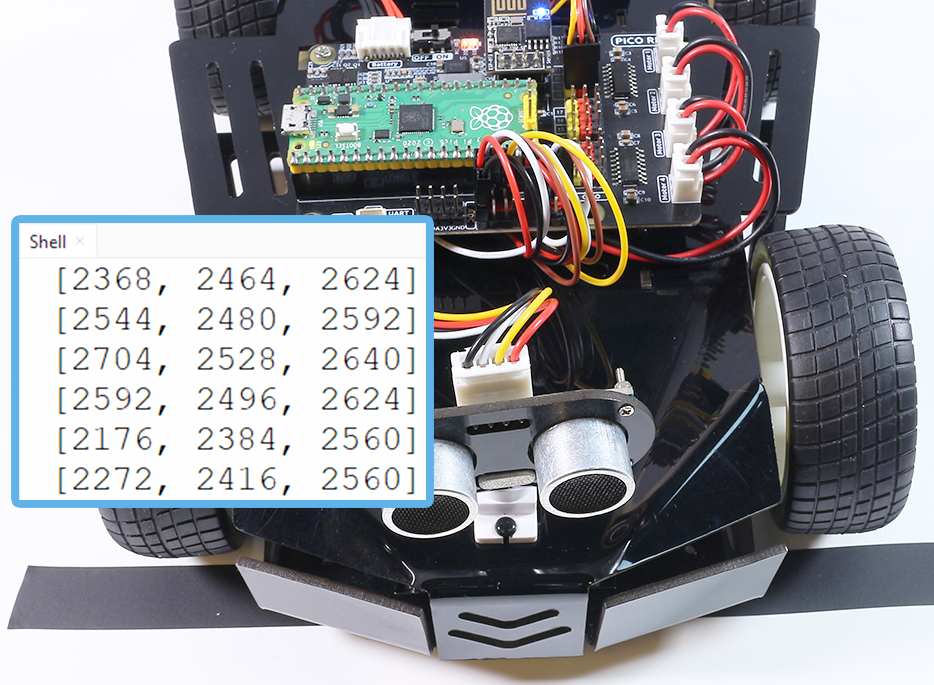
- Black line
The value on the black line will be smaller, and now I’m at about 2000.
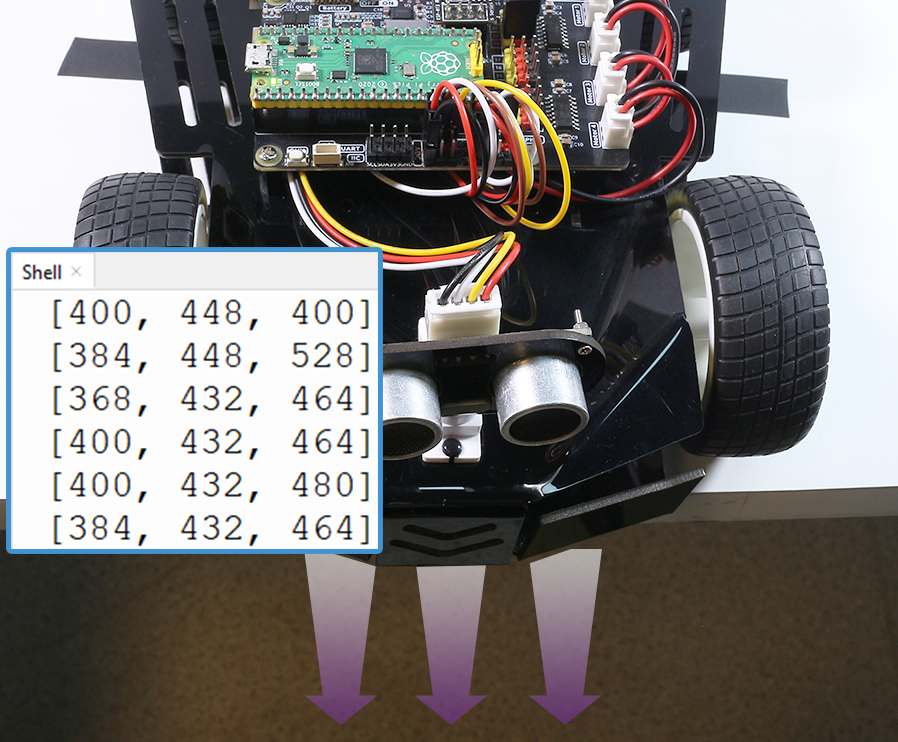
- Overhang (10cm or more)
And the value of the overhang will be even smaller, already less than 1000 in my environment.
Taking my detection environment as an example.
My car reads around 24000 in the white area and around 2000 in the black line, so I set
line_refto about the middle value of10000.In the cliff area it reads less than 1000, so I set
edge_refto1000.