Nota
¡Hola! Bienvenido a la Comunidad de Entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook. Sumérgete en el mundo de Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirse?
Soporte Experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances Exclusivos: Accede anticipadamente a anuncios de nuevos productos y adelantos exclusivos.
Descuentos Especiales: Aprovecha descuentos exclusivos en nuestros productos más recientes.
Promociones Festivas y Sorteos: Participa en sorteos y promociones especiales.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
1.3.3 Motor a Pasos
Introducción
Los motores a pasos, debido a su diseño único, pueden ser controlados con un alto grado de precisión sin necesidad de mecanismos de retroalimentación. El eje de un motor a pasos, equipado con una serie de imanes, es controlado por una secuencia específica de bobinas electromagnéticas que se cargan positiva y negativamente, moviéndolo hacia adelante o hacia atrás en pequeños "pasos".
Componentes Necesarios
En este proyecto, necesitamos los siguientes componentes.
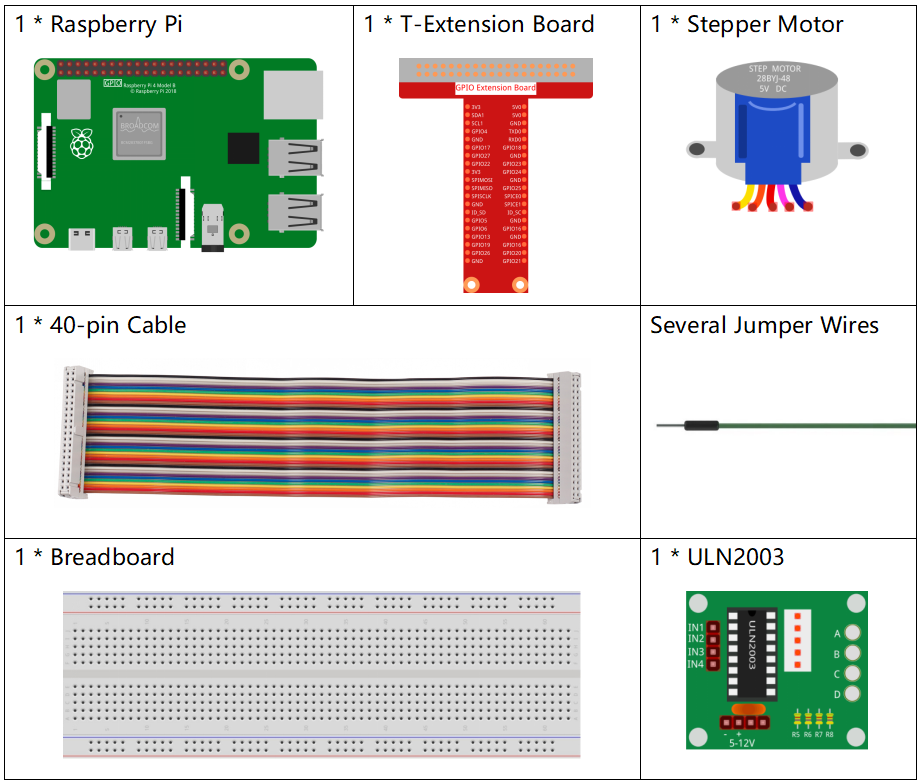
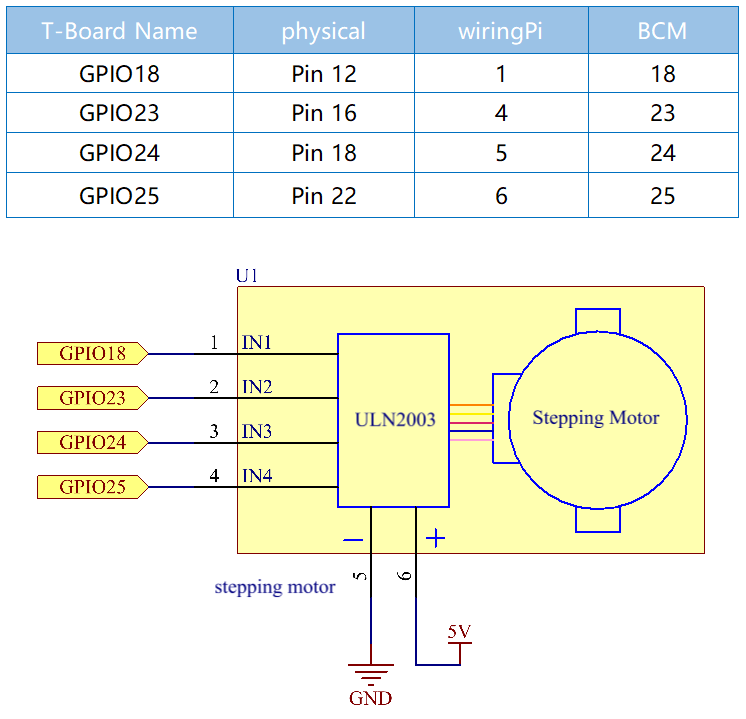
Diagrama de Conexiones
Procedimientos del Experimento
Paso 1: Construye el circuito.

Paso 2: Abre el archivo de código.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Paso 3: Ejecuta el código.
sudo python3 1.3.3_StepperMotor.py
Al ejecutar el código, el motor a pasos girará en sentido horario o antihorario, dependiendo de la entrada 'a' o 'c'.
Advertencia
Si aparece el mensaje de error RuntimeError: Cannot determine SOC peripheral base address, consulta Si gpiozero no funciona.
Código
Nota
Puedes Modificar/Restablecer/Copiar/Ejecutar/Detener el código a continuación. Antes de eso, asegúrate de estar en la ruta del código fuente, como davinci-kit-for-raspberry-pi/python-pi5. Después de modificar el código, puedes ejecutarlo directamente para ver el efecto.
#!/usr/bin/env python3
from gpiozero import OutputDevice
from time import sleep
# Inicializa los pines del motor a los GPIO 18, 23, 24, 25
motorPin = [OutputDevice(pin) for pin in (18, 23, 24, 25)]
# Define parámetros de velocidad de rotación del motor
rotationPerMinute = 15
stepsPerRevolution = 2048
# Calcula el tiempo de espera entre cada paso para un funcionamiento suave
stepSpeed = (60 / rotationPerMinute) / stepsPerRevolution
def rotary(direction):
"""
Controls the rotation of the motor based on the specified direction.
:param direction: 'c' for clockwise, 'a' for anti-clockwise
"""
if direction == 'c':
# Ejecuta la secuencia de pasos para rotación en sentido horario
for j in range(4):
for i in range(4):
if 0x99 << j & (0x08 >> i):
motorPin[i].on()
else:
motorPin[i].off()
sleep(stepSpeed)
elif direction == 'a':
# Ejecuta la secuencia de pasos para rotación en sentido antihorario
for j in range(4):
for i in range(4):
if 0x99 >> j & (0x08 >> i):
motorPin[i].on()
else:
motorPin[i].off()
sleep(stepSpeed)
def loop():
"""
Continuously prompts the user to select the motor rotation direction
and controls the motor based on this input.
"""
while True:
direction = input('Select motor direction a=anticlockwise, c=clockwise: ')
if direction == 'c':
print('Motor running clockwise\n')
break
elif direction == 'a':
print('Motor running anti-clockwise\n')
break
else:
print('Input error, please try again!')
# Mantiene el motor girando en la dirección seleccionada
while True:
rotary(direction)
def destroy():
"""
Safely turns off all motor pins, used for clean shutdown.
"""
for pin in motorPin:
pin.off()
# Ejecución principal del programa
try:
loop()
except KeyboardInterrupt:
destroy() # Maneja la interrupción de teclado para apagar el motor de manera segura
Explicación del Código
Esta sección importa las bibliotecas necesarias.
gpiozeropara controlar los pines GPIO ytimepara la función sleep utilizada en el control de temporización.#!/usr/bin/env python3 from gpiozero import OutputDevice from time import sleep
Inicializa los pines GPIO 18, 23, 24 y 25 como dispositivos de salida para controlar el motor a pasos.
# Inicializa los pines del motor a los GPIO 18, 23, 24, 25 motorPin = [OutputDevice(pin) for pin in (18, 23, 24, 25)]
Configura la velocidad de rotación del motor y calcula el intervalo de tiempo entre cada paso para un funcionamiento suave.
# Define parámetros de velocidad de rotación del motor rotationPerMinute = 15 stepsPerRevolution = 2048 # Calcula el tiempo de espera entre cada paso para un funcionamiento suave stepSpeed = (60 / rotationPerMinute) / stepsPerRevolution
La función
rotarycontrola la rotación del motor usando manipulación de bits y una secuencia de pasos para activar los pines en el orden correcto para la rotación en sentido horario o antihorario.def rotary(direction): """ Controls the rotation of the motor based on the specified direction. :param direction: 'c' for clockwise, 'a' for anti-clockwise """ if direction == 'c': # Ejecuta la secuencia de pasos para rotación en sentido horario for j in range(4): for i in range(4): if 0x99 << j & (0x08 >> i): motorPin[i].on() else: motorPin[i].off() sleep(stepSpeed) elif direction == 'a': # Ejecuta la secuencia de pasos para rotación en sentido antihorario for j in range(4): for i in range(4): if 0x99 >> j & (0x08 >> i): motorPin[i].on() else: motorPin[i].off() sleep(stepSpeed)
Esta función solicita continuamente al usuario que elija la dirección de rotación del motor y controla el motor en función de la entrada.
def loop(): """ Continuously prompts the user to select the motor rotation direction and controls the motor based on this input. """ while True: direction = input('Select motor direction a=anticlockwise, c=clockwise: ') if direction == 'c': print('Motor running clockwise\n') break elif direction == 'a': print('Motor running anti-clockwise\n') break else: print('Input error, please try again!') # Mantiene el motor girando en la dirección seleccionada while True: rotary(direction)
La función
destroyapaga todos los pines del motor. Es utilizada para un apagado seguro, asegurando que el motor se detenga al finalizar el programa.def destroy(): """ Safely turns off all motor pins, used for clean shutdown. """ for pin in motorPin: pin.off()
El programa principal llama a
loopy maneja interrupciones de teclado (como Ctrl+C) para apagar el motor de manera segura usandodestroy.# Ejecución principal del programa try: loop() except KeyboardInterrupt: destroy() # Maneja la interrupción de teclado para apagar el motor de manera segura