Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
Automatisches Eingangssystem mit Raspberry Pi¶
In diesem Projekt verwenden wir einen PIR-Sensor, um die Bewegung von Fußgängern zu erkennen und mit Servos, LEDs und einem Summer die Funktion einer automatischen Sensortür eines Convenience-Shops zu simulieren. Wenn ein Fußgänger im Erfassungsbereich des PIR-Sensors erscheint, wird das Anzeigelicht aktiviert, die Tür öffnet sich, und der Summer spielt den Öffnungsgong.
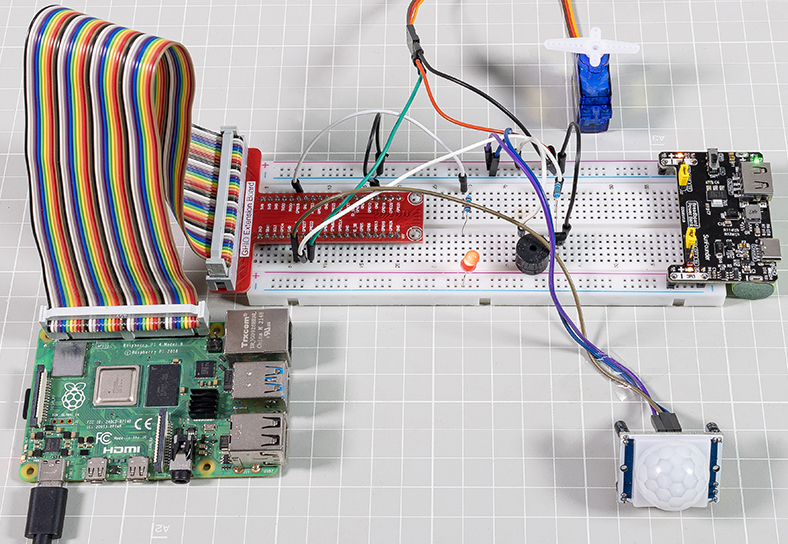
Benötigte Komponenten
Für dieses Projekt benötigen wir folgende Komponenten:
Raspberry Pi
GPIO-Erweiterungsplatine
Widerstand
LED
PIR-Bewegungssensormodul
Servo
Summer
Transistor
800 Löcher Breadboard
Jumperkabel
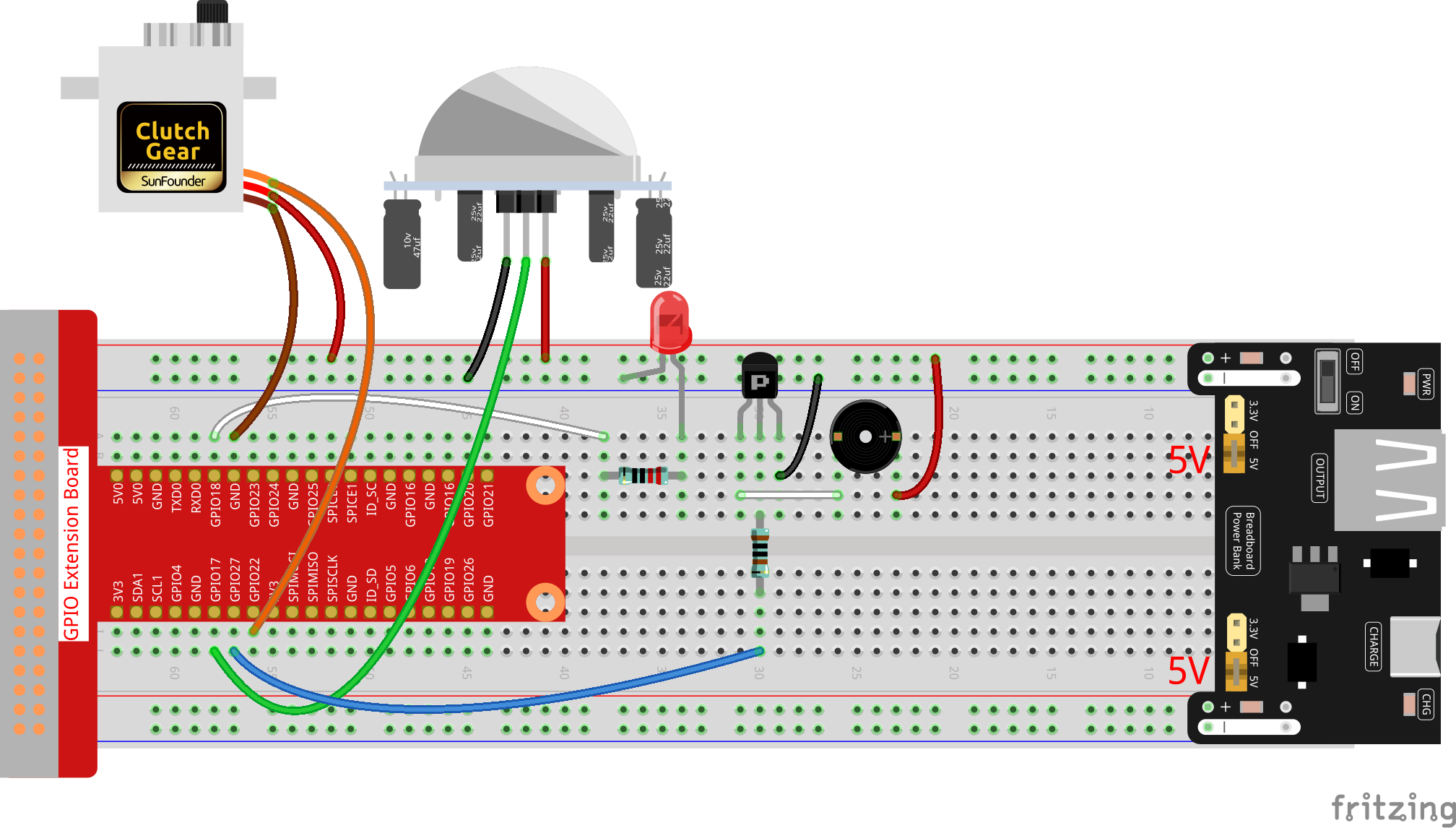
Schaltplan
Code
#!/usr/bin/env python3
from gpiozero import LED, MotionSensor, Servo, TonalBuzzer
import time
# GPIO pin setup for LED, motion sensor (PIR), and buzzer
ledPin = LED(6)
pirPin = MotionSensor(21)
buzPin = TonalBuzzer(27)
# Servo motor pulse width correction factor and calculation
myCorrection = 0.45
maxPW = (2.0 + myCorrection) / 1000 # Maximum pulse width
minPW = (1.0 - myCorrection) / 1000 # Minimum pulse width
# Initialize servo with custom pulse widths
servoPin = Servo(25, min_pulse_width=minPW, max_pulse_width=maxPW)
# Musical tune for buzzer, with notes and durations
tune = [('C#4', 0.2), ('D4', 0.2), (None, 0.2),
('Eb4', 0.2), ('E4', 0.2), (None, 0.6),
('F#4', 0.2), ('G4', 0.2), (None, 0.6),
('Eb4', 0.2), ('E4', 0.2), (None, 0.2),
('F#4', 0.2), ('G4', 0.2), (None, 0.2),
('C4', 0.2), ('B4', 0.2), (None, 0.2),
('F#4', 0.2), ('G4', 0.2), (None, 0.2),
('B4', 0.2), ('Bb4', 0.5), (None, 0.6),
('A4', 0.2), ('G4', 0.2), ('E4', 0.2),
('D4', 0.2), ('E4', 0.2)]
def setAngle(angle):
"""
Move the servo to a specified angle.
:param angle: Angle in degrees (0-180).
"""
value = float(angle / 180) # Convert angle to servo value
servoPin.value = value # Set servo position
time.sleep(0.001) # Short delay for servo movement
def doorbell():
"""
Play a musical tune using the buzzer.
"""
for note, duration in tune:
buzPin.play(note) # Play the note
time.sleep(float(duration)) # Duration of the note
buzPin.stop() # Stop buzzer after playing the tune
def closedoor():
# Turn off LED and move servo to close door
ledPin.off()
for i in range(180, -1, -1):
setAngle(i) # Move servo from 180 to 0 degrees
time.sleep(0.001) # Short delay for smooth movement
time.sleep(1) # Wait after closing door
def opendoor():
# Turn on LED, open door (move servo), play tune, close door
ledPin.on()
for i in range(0, 181):
setAngle(i) # Move servo from 0 to 180 degrees
time.sleep(0.001) # Short delay for smooth movement
time.sleep(1) # Wait before playing the tune
doorbell() # Play the doorbell tune
closedoor() # Close the door after the tune
def loop():
# Main loop to check for motion and operate door
while True:
if pirPin.motion_detected:
opendoor() # Open door if motion detected
time.sleep(0.1) # Short delay in loop
try:
loop()
except KeyboardInterrupt:
# Clean up GPIO on user interrupt (e.g., Ctrl+C)
buzPin.stop()
ledPin.off()
Nachdem der Code ausgeführt wurde, wird die Tür automatisch öffnen (durch den Servo simuliert), das Anzeigelicht einschalten und die Türklingelmusik spielen, wenn der PIR-Sensor jemanden vorbeigehen erkennt. Nachdem die Türklingelmusik gespielt hat, schließt das System automatisch die Tür und schaltet das Anzeigelicht aus, um auf das nächste Vorbeigehen zu warten.