记录姿势¶
我们使用遥控功能控制 PiCrawler 依次摆出几个新的姿势,并记录下这些姿势。然后让 PiCrawler 重复这些姿势。
程序
注解
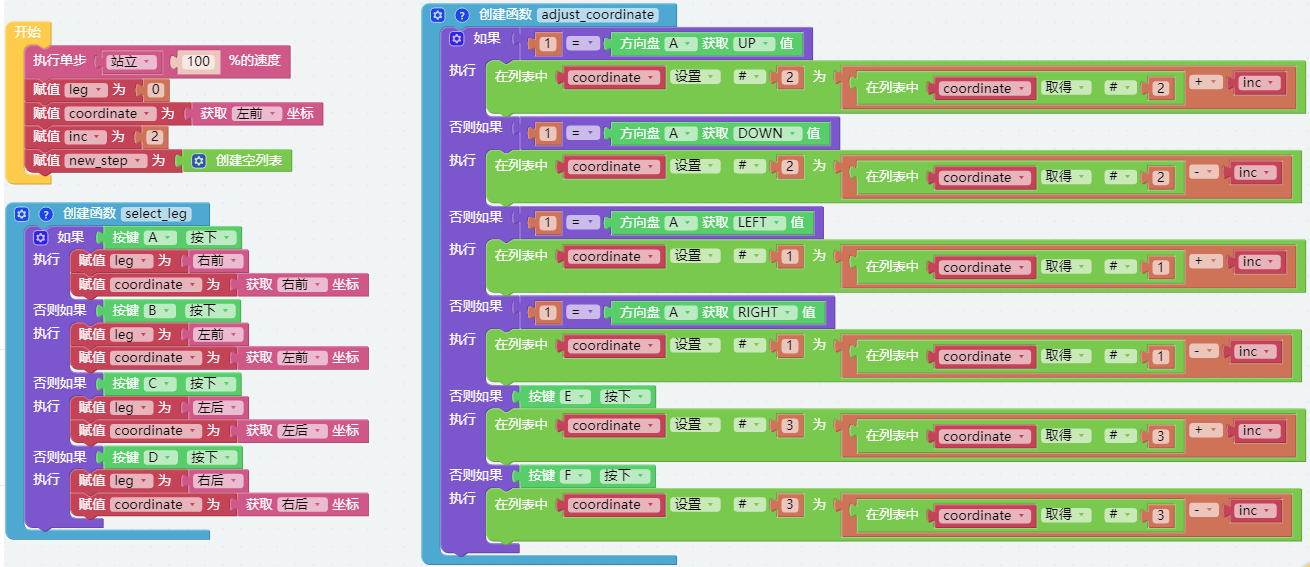
你可以直接打开我们提供的示例或者是按照下图来编写程序,详细教程请参考 打开或新建项目。

程序运行后,切换到远程控制界面,您将看到以下小部件。

按钮A,B,C和D是用来选择不同的腿。
用E,F和方向盘用来调整每条腿的X,Y和Z坐标。
按键H来记录新动作,按键I来重复记录的动作。
将PiCrawler调整到自己想要的姿势后,按下按钮G来打印所有腿的坐标值。
这个如何运作?
这个项目可以参考之前的 调整姿势。 我们在这里新增了记录和回放的功能。
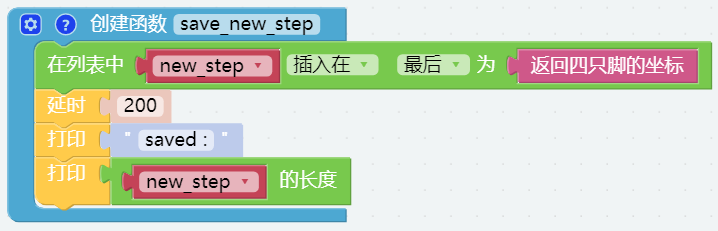
记录功能由以下代码实现。
回放功能由以下代码实现。
