调整姿势¶
在本项目中,我们使用远程控制界面的小部件来调整 PiCrawler 的腿来摆出我们想要的姿势。
您可以打印出 PiCrawler 当前动作的坐标值。当您自定义创建独特的动作时,这些坐标值会派上用场。
程序
注解
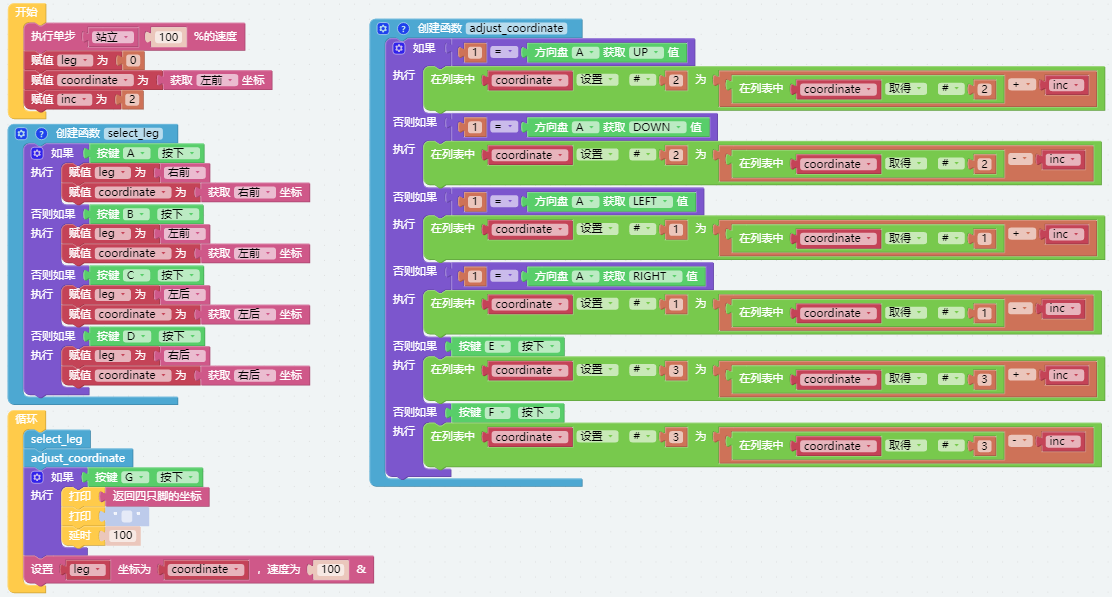
你可以直接打开我们提供的示例或者是按照下图来编写程序,详细教程请参考 打开或新建项目。
程序运行后,切换到远程控制界面,您将看到以下小部件。
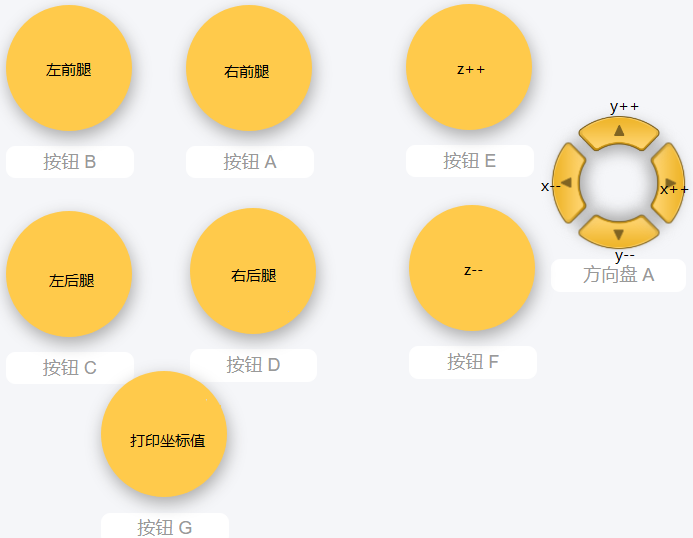
按钮A,B,C和D是用来选择不同的腿。
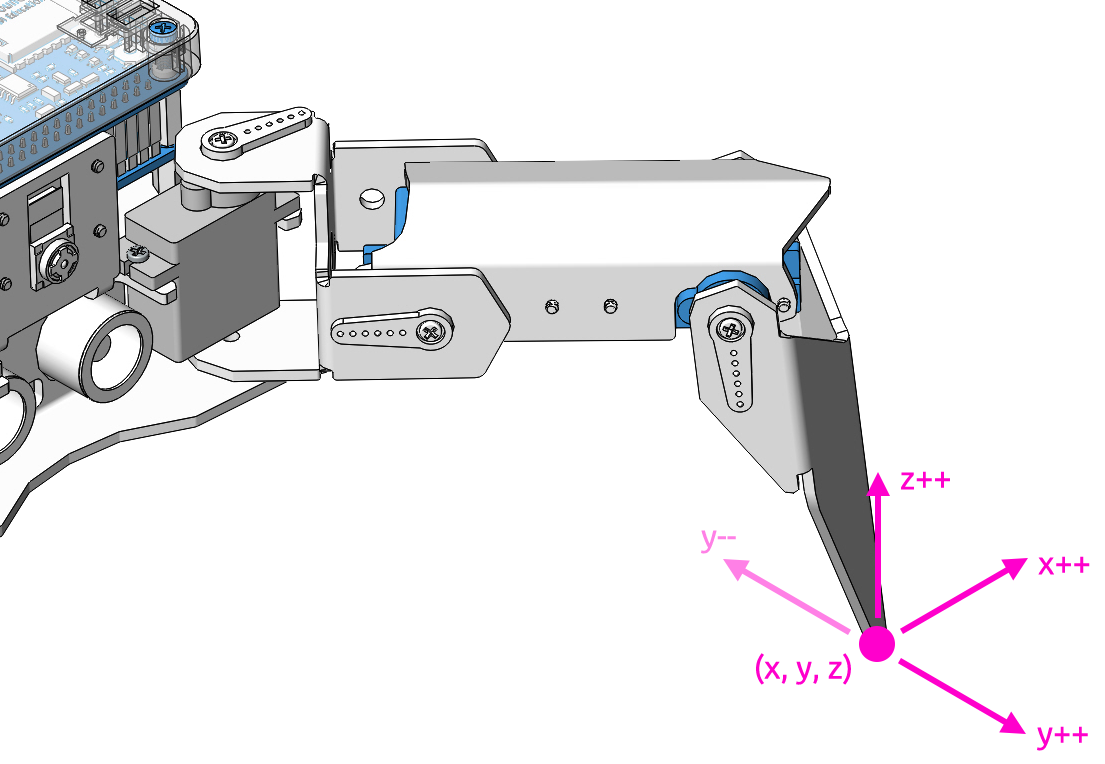
用E,F和方向盘用来调整每条腿的X,Y和Z坐标。
将PiCrawler调整到自己想要的姿势后,按下按钮G来打印所有腿的坐标值。
这个如何运作?
在这个项目中需要注意以下三个积木块:

单独修改某条腿的坐标值。
返回相应退的坐标值。
您可能希望使用函数来简化程序,尤其是当您多次执行相同的操作时。把这些操作放到一个新声明的函数中,可以大大简化你的代码。