Adjust Posture¶
In this example, we use the keyboard to control the PiCrawler foot by foot and assume the desired posture.
You can press the space bar to print out the current coordinate values. These coordinate values come in handy when you create unique actions for PiCrawler.
Run the Code
cd /home/pi/picrawler/examples
sudo python3 do_single_leg.py
After the code runs, please operate according to the prompt that pops up in the terminal.
Code
from picrawler import Picrawler
from time import sleep
import sys
import tty
import termios
crawler = Picrawler([10,11,12,4,5,6,1,2,3,7,8,9])
#crawler.set_offset([0,0,0,0,0,0,0,0,0,0,0,0])
speed = 80
def readchar():
fd = sys.stdin.fileno()
old_settings = termios.tcgetattr(fd)
try:
tty.setraw(sys.stdin.fileno())
ch = sys.stdin.read(1)
finally:
termios.tcsetattr(fd, termios.TCSADRAIN, old_settings)
return ch
manual = '''
Press keys on keyboard to control PiSloth!
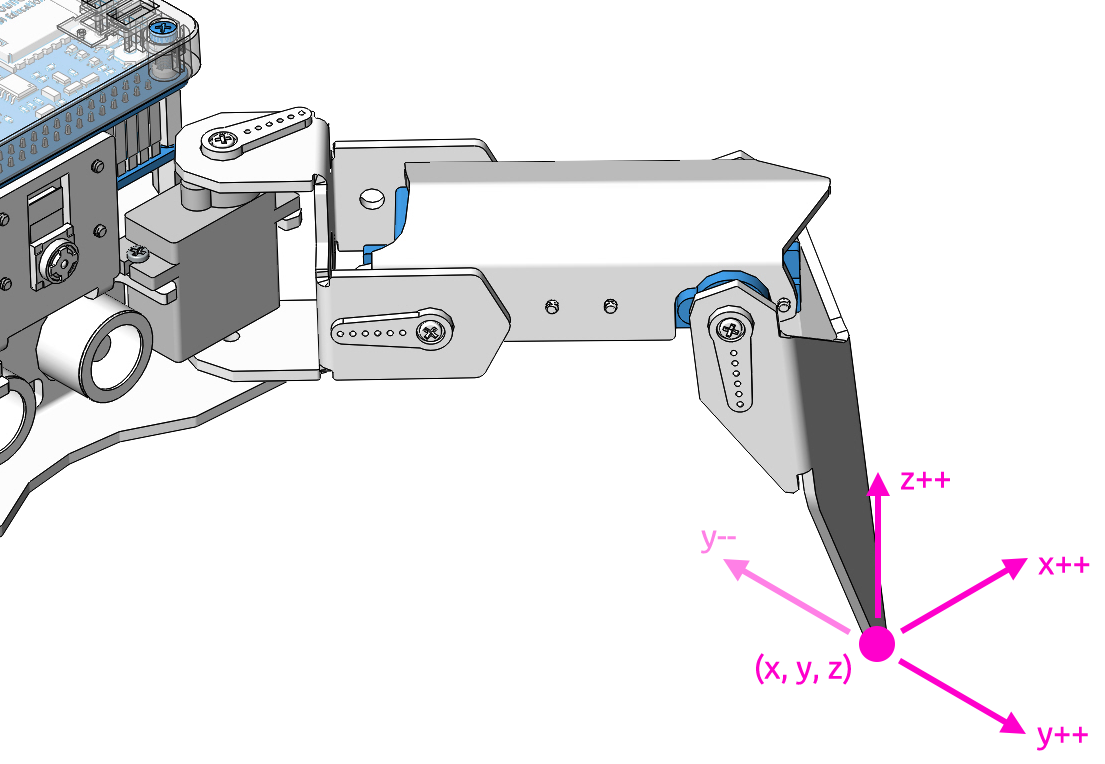
W: Y++
A: X--
S: Y--
D: X++
R: Z++
F: Z--
1: Select right front leg
2: Select left front leg
3: Select left rear leg
4: Select right rear leg
Space: Print all leg coordinate
ESC: Quit
'''
def main():
speed = 80
print(manual)
crawler.do_step('stand',speed)
leg = 0
coordinate=crawler.current_step_leg_value(leg)
while True:
key = readchar()
print(key)
if 'w' == key:
coordinate[1]=coordinate[1]+5
elif 's' == key:
coordinate[1]=coordinate[1]-5
elif 'a' == key:
coordinate[0]=coordinate[0]-5
elif 'd' == key:
coordinate[0]=coordinate[0]+5
elif 'r' == key:
coordinate[2]=coordinate[2]+5
elif 'f' == key:
coordinate[2]=coordinate[2]-5
elif '1' == key:
leg=0
coordinate=crawler.current_step_leg_value(leg)
elif '2' == key:
leg=1
coordinate=crawler.current_step_leg_value(leg)
elif '3' == key:
leg=2
coordinate=crawler.current_step_leg_value(leg)
elif '4' == key:
leg=3
coordinate=crawler.current_step_leg_value(leg)
elif chr(32) == key:
print("[[right front],[left front],[left rear],[right rear]]")
print(crawler.current_step_all_leg_value())
elif chr(27) == key:# 27 for ESC
break
sleep(0.05)
crawler.do_single_leg(leg,coordinate,speed)
print("\n q Quit")
if __name__ == "__main__":
main()
How it works?
What you need to pay attention to in this project are the following three functions:
current_step_leg_value(leg)
current_step_all_leg_value()
do_single_leg(leg,coordinate,speed)
current_step_leg_value(leg): Returns the coordinate value of the corresponding leg. The parameterlegcan be0,1,2,3four values, corresponding to right front, left front, left rear, left rear four values respectively leg.current_step_all_leg_value(): Returns the coordinate values of all legs.do_single_leg(leg,coordinate,speed): Modify the coordinate value of a certain leg individually.