Obstacle Avoidance — Ezblock¶
In this project, picrawler will use an ultrasonic module to detect obstacles in front. When PiCrawler detects an obstacle, it will send a signal and look for another direction to move forward.
Program
After opening the example, you can see the following code block.
How it works?
You can find the following blocks in the Module category to achieve distance detection:
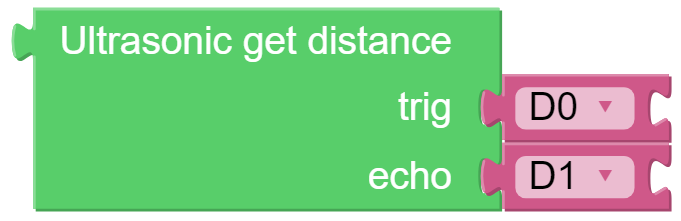
It should be noted that the two pins of the block should correspond to the actual wiring, that is, trig-D2, echo-D3.
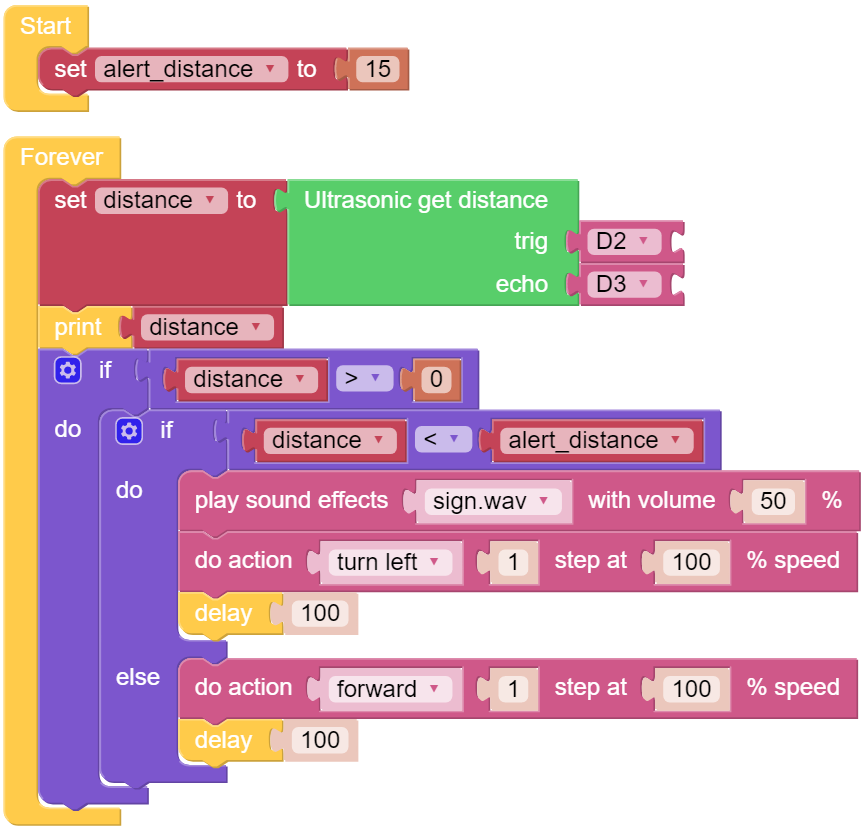
Here is the main program.
Read the
distancedetected by ultrasonic module and filter out the values less than 0 (When the ultrasonic module is too far from the obstacle or cannot read the data correctly,distance<0will appear).When the
distanceis less thanalert_distance(the threshold value set earlier, which is 10), play the sound effectsign.wav. PiCrawler doesturn left.When the
distanceis greater thanalert_distance, PiCrawler will moveforward.