颜色检测¶
该项目将在之前的 计算机视觉 项目中添加颜色检测算法。
备注
由于打印机碳粉或打印介质(如棕褐色纸)的差异,打印的颜色可能与 Python 颜色模型的色调略有不同。 这会导致不太准确的颜色识别。

运行代码
备注
这个项目需要访问树莓派的桌面来查看相机模块拍摄的画面。
你可以将屏幕连接到PiCar-X上,或者参考教程 远程桌面,用VNC或XRDP访问它。
一旦进入树莓派的桌面,打开Terminal并输入以下命令来运行它,或者直接用Python编辑器打开并运行它。
cd /home/pi/picar-x/example
sudo python3 color_detect.py
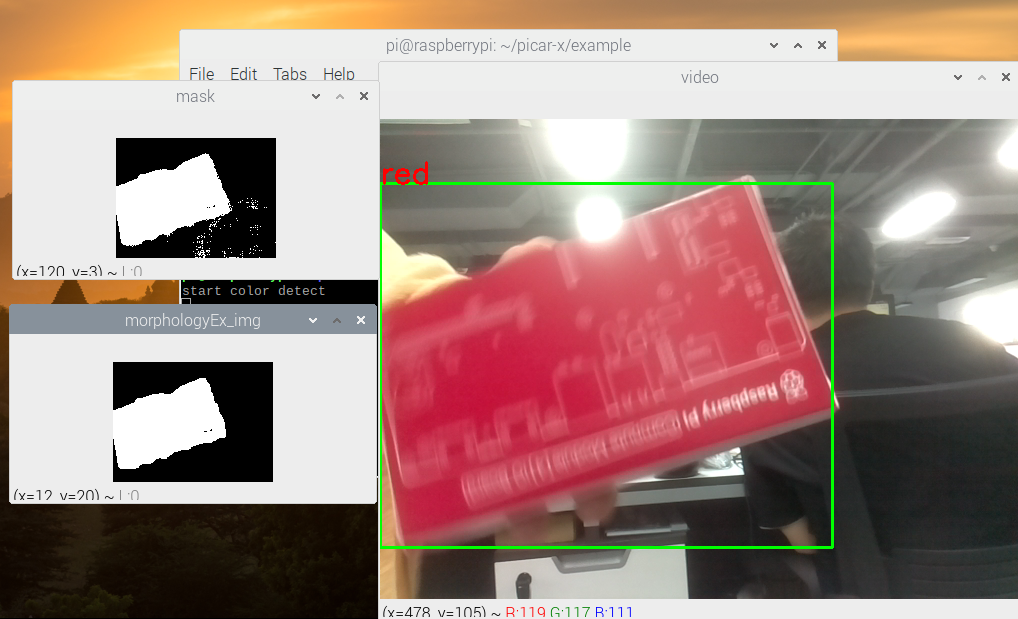
当代码运行时,如果 PiCar-X 捕捉到一个红色物体,它会将其框出来。您还可以 'red' 将代码中的 更改为另一种颜色以进行检测。
代码
import cv2
from picamera.array import PiRGBArray
from picamera import PiCamera
import numpy as np
import time
color_dict = {'red':[0,4],'orange':[5,18],'yellow':[22,37],'green':[42,85],'blue':[92,110],'purple':[115,165],'red_2':[165,180]} #Here is the range of H in the HSV color space represented by the color
kernel_5 = np.ones((5,5),np.uint8) #Define a 5×5 convolution kernel with element values of all 1.
def color_detect(img,color_name):
# The blue range will be different under different lighting conditions and can be adjusted flexibly. H: chroma, S: saturation v: lightness
resize_img = cv2.resize(img, (160,120), interpolation=cv2.INTER_LINEAR) # In order to reduce the amount of calculation, the size of the picture is reduced to (160,120)
hsv = cv2.cvtColor(resize_img, cv2.COLOR_BGR2HSV) # Convert from BGR to HSV
color_type = color_name
mask = cv2.inRange(hsv,np.array([min(color_dict[color_type]), 60, 60]), np.array([max(color_dict[color_type]), 255, 255]) ) # inRange():Make the ones between lower/upper white, and the rest black
if color_type == 'red':
mask_2 = cv2.inRange(hsv, (color_dict['red_2'][0],0,0), (color_dict['red_2'][1],255,255))
mask = cv2.bitwise_or(mask, mask_2)
morphologyEx_img = cv2.morphologyEx(mask, cv2.MORPH_OPEN, kernel_5,iterations=1) # Perform an open operation on the image
# Find the contour in morphologyEx_img, and the contours are arranged according to the area from small to large.
_tuple = cv2.findContours(morphologyEx_img,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
# compatible with opencv3.x and openc4.x
if len(_tuple) == 3:
_, contours, hierarchy = _tuple
else:
contours, hierarchy = _tuple
color_area_num = len(contours) # Count the number of contours
if color_area_num > 0:
for i in contours: # Traverse all contours
x,y,w,h = cv2.boundingRect(i) # Decompose the contour into the coordinates of the upper left corner and the width and height of the recognition object
# Draw a rectangle on the image (picture, upper left corner coordinate, lower right corner coordinate, color, line width)
if w >= 8 and h >= 8: # Because the picture is reduced to a quarter of the original size, if you want to draw a rectangle on the original picture to circle the target, you have to multiply x, y, w, h by 4.
x = x * 4
y = y * 4
w = w * 4
h = h * 4
cv2.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2) # Draw a rectangular frame
cv2.putText(img,color_type,(x,y), cv2.FONT_HERSHEY_SIMPLEX, 1,(0,0,255),2)# Add character description
return img,mask,morphologyEx_img
with PiCamera() as camera:
print("start color detect")
camera.resolution = (640,480)
camera.framerate = 24
rawCapture = PiRGBArray(camera, size=camera.resolution)
time.sleep(2)
for frame in camera.capture_continuous(rawCapture, format="bgr",use_video_port=True):# use_video_port=True
img = frame.array
img,img_2,img_3 = color_detect(img,'red') # Color detection function
cv2.imshow("video", img) # OpenCV image show
cv2.imshow("mask", img_2) # OpenCV image show
cv2.imshow("morphologyEx_img", img_3) # OpenCV image show
rawCapture.truncate(0) # Release cache
k = cv2.waitKey(1) & 0xFF
# 27 is the ESC key, which means that if you press the ESC key to exit
if k == 27:
break
print('quit ...')
cv2.destroyAllWindows()
camera.close()
这个怎么运作?
首先将 HSV颜色空间 中H的范围定义为字典,方便后面的颜色判断算法:
color_dict = {'red':[0,4],'orange':[5,18],'yellow':[22,37],'green':[42,85],'blue':[92,110],'purple':[115,165],'red_2':[165,180]}
然后,定义大小为 5x5 的 卷积核 ,将用于形态学操作,如过滤。
kernel_5 = np.ones((5,5),np.uint8)
接下来, color_detect() 函数将分四步处理图片:
提取目标颜色的数据作为新的二值图像(数组)。
执行高级形态变换。
在二值图像中寻找轮廓。
在图像上为识别的对象绘制一个框架。
def color_detect(img,color_name):
# The blue range will be different under different lighting conditions and can be adjusted flexibly. H: chroma, S: saturation v: lightness
resize_img = cv2.resize(img, (160,120), interpolation=cv2.INTER_LINEAR) # In order to reduce the amount of calculation, the size of the picture is reduced to (160,120)
hsv = cv2.cvtColor(resize_img, cv2.COLOR_BGR2HSV) # Convert from BGR to HSV
color_type = color_name
mask = cv2.inRange(hsv,np.array([min(color_dict[color_type]), 60, 60]), np.array([max(color_dict[color_type]), 255, 255]) ) # inRange():Make the ones between lower/upper white, and the rest black
if color_type == 'red':
mask_2 = cv2.inRange(hsv, (color_dict['red_2'][0],0,0), (color_dict['red_2'][1],255,255))
mask = cv2.bitwise_or(mask, mask_2)
morphologyEx_img = cv2.morphologyEx(mask, cv2.MORPH_OPEN, kernel_5,iterations=1) # Perform an open operation on the image
# Find the contour in morphologyEx_img, and the contours are arranged according to the area from small to large.
_tuple = cv2.findContours(morphologyEx_img,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
# compatible with opencv3.x and openc4.x
if len(_tuple) == 3:
_, contours, hierarchy = _tuple
else:
contours, hierarchy = _tuple
color_area_num = len(contours) # Count the number of contours
if color_area_num > 0:
for i in contours: # Traverse all contours
x,y,w,h = cv2.boundingRect(i) # Decompose the contour into the coordinates of the upper left corner and the width and height of the recognition object
# Draw a rectangle on the image (picture, upper left corner coordinate, lower right corner coordinate, color, line width)
if w >= 8 and h >= 8: # Because the picture is reduced to a quarter of the original size, if you want to draw a rectangle on the original picture to circle the target, you have to multiply x, y, w, h by 4.
x = x * 4
y = y * 4
w = w * 4
h = h * 4
cv2.rectangle(img,(x,y),(x+w,y+h),(0,255,0),2) # Draw a rectangular frame
cv2.putText(img,color_type,(x,y), cv2.FONT_HERSHEY_SIMPLEX, 1,(0,0,255),2)# Add character description
return img,mask,morphologyEx_img
img , mask , morphologyEx_img 显示在三个窗口中,可以直接观察每一步的处理结果。