サーボ調整(重要)¶
サーボの角度範囲は-90〜90度ですが、工場で設定された角度はランダムで、0°かもしれませんし、45°かもしれません。このような角度で直接組み立てると、ロボットがコードを実行した後に混乱状態になったり、最悪の場合はサーボがブロックして焼損する原因となります。
したがって、サーボの角度を0°に設定してから取り付ける必要があります。そうすれば、どちらの方向に回転してもサーボの角度は中央になります。
サーボが正しく0°に設定されていることを確認するために、まずサーボアームをサーボシャフトに挿入し、その後ロッカーアームを優しく異なる角度に回転させます。このサーボアームは、サーボが回転していることをはっきりと確認できるようにするためのものです。

次に、
example/フォルダ内のservo_zeroing.pyを実行します。cd ~/picar-x/example sudo python3 servo_zeroing.py
次に、以下のようにサーボケーブルをP11ポートに接続します。同時にサーボアームが位置に回転するのを見ることができます(これが0°の位置で、ランダムな位置であり、垂直または平行でない場合があります)。
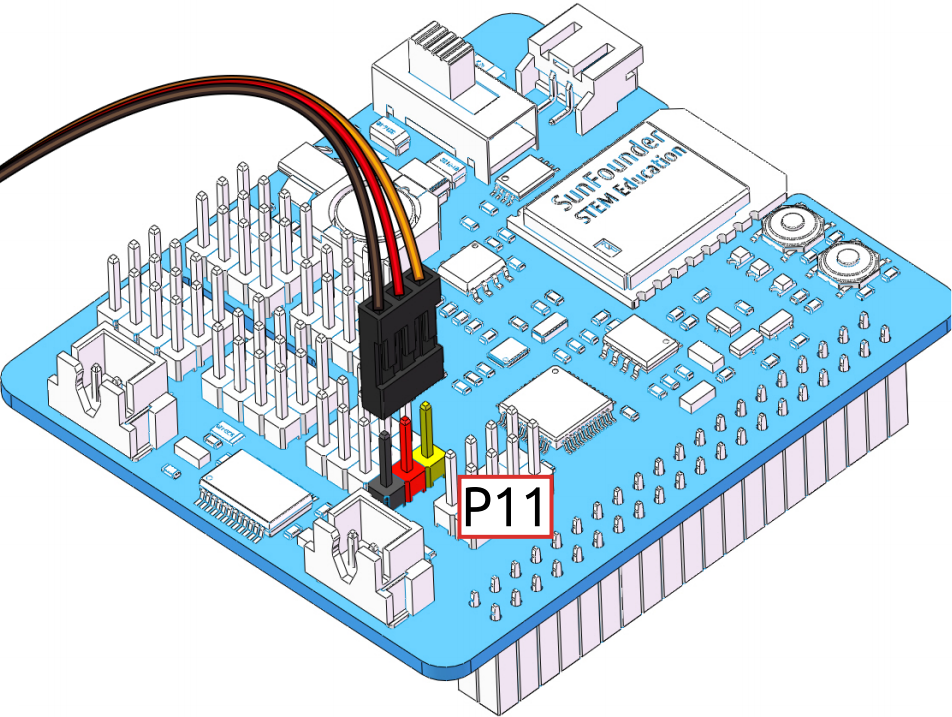
今、サーボアームを取り外し、サーボワイヤーが接続されたままにし、電源を切らないでください。その後、紙の指示に従って組み立てを続けます。
注釈
サーボネジで固定する前に、このサーボケーブルを抜かないでください。固定した後に抜くことができます。
電源が入っている状態でサーボを回転させないでください。サーボシャフトが正しい角度に挿入されていない場合は、サーボを取り出して再度挿入してください。
各サーボを組み立てる前に、P11にサーボケーブルを接続し、電源を入れてその角度を0°に設定する必要があります。