Remote Control¶
Here is what we’re going to do:
Use the Raspberry Pi as the server. Run a web server with an API for controlling the car and transmitting images captured by the camera.
Then take a PC, cell phone, or tablet as the client, and acquire the images from the camera and control the car by calling the API of the web server.
Now, you can power on the car again. You are also recommended to use the power adapter of Raspberry Pi to power your car for that the first test will take a long time.
Run the Server(Operation on Raspberry Pi)¶
Remotely log into the Raspberry Pi. Run the startup script start under the remote_control directory to start the web service.
cd ~/SunFounder_PiCar-V/remote_control
python3 manage.py migrate
sudo ./start
The script will enable the service and the corresponding data will appear. The hardware is initialized at the same time, so the servos connected to the front wheels and the pan-and-tilt will turn, indicating the hardware initialization is done.
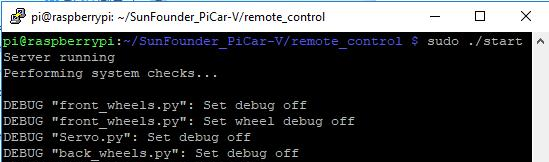
If you get the result similar as shown above, the server is ready. Now move on to start the client.
Warning
Keep the server being running all the time until you stop to run the Client.
Run the Client(Operation on PC)¶
Visit the server of the car at http://<RPi_IP_address>:8000/. You will see a welcome page:
Click LET’S ROCK to go to the operation interface:
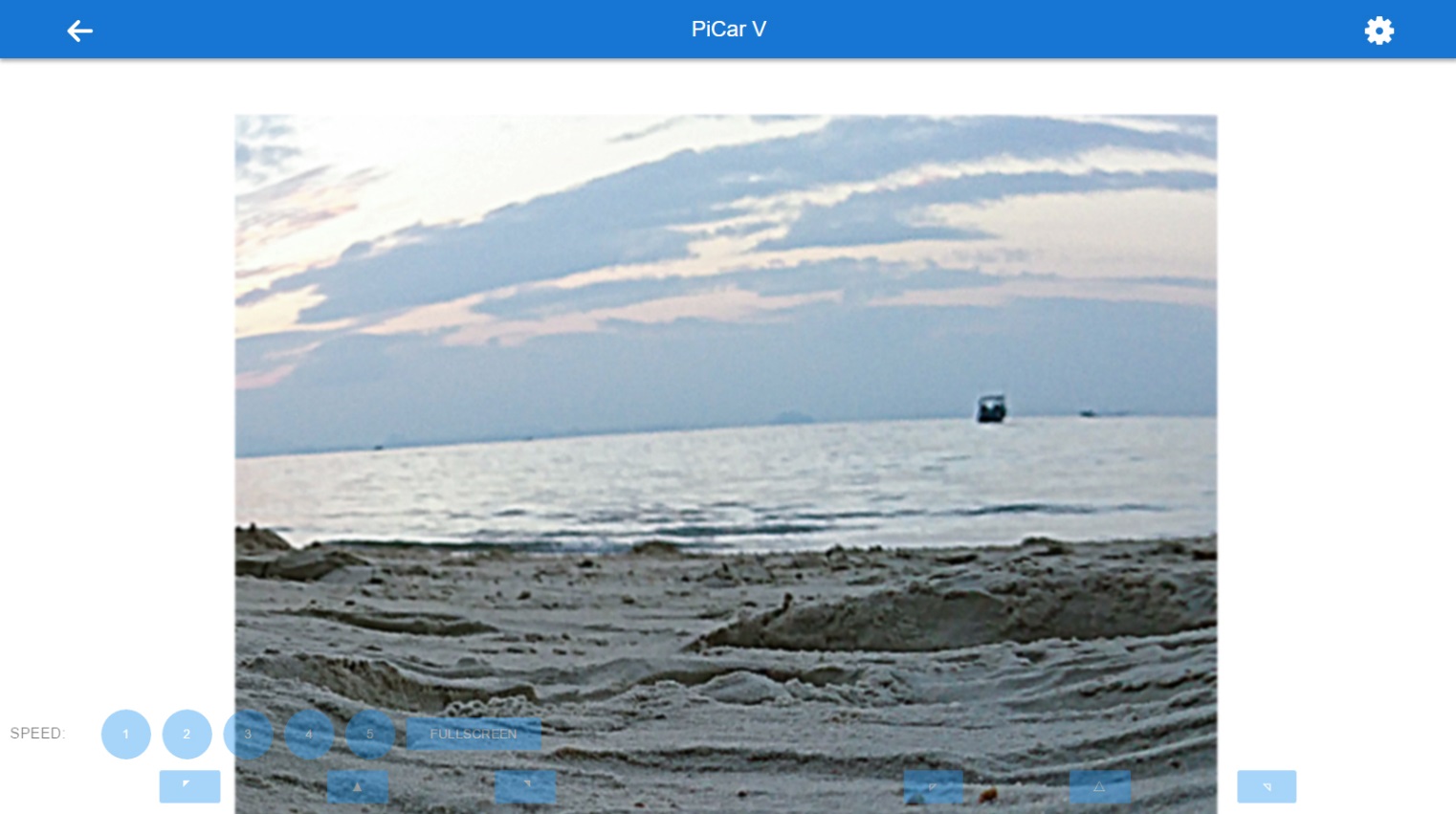
On this page, you can press the keys W, A, S, and D on the keyboard to control the car to move forward, backward, turn left, and turn right, press the arrow keys to control the camera’s movement, and number 1~5 to change the speed level.
Calibration
Click FULLSCREEN again to bring back the title bar. And then, tap the setting button at the top-right corner of the page to go to the calibration page:
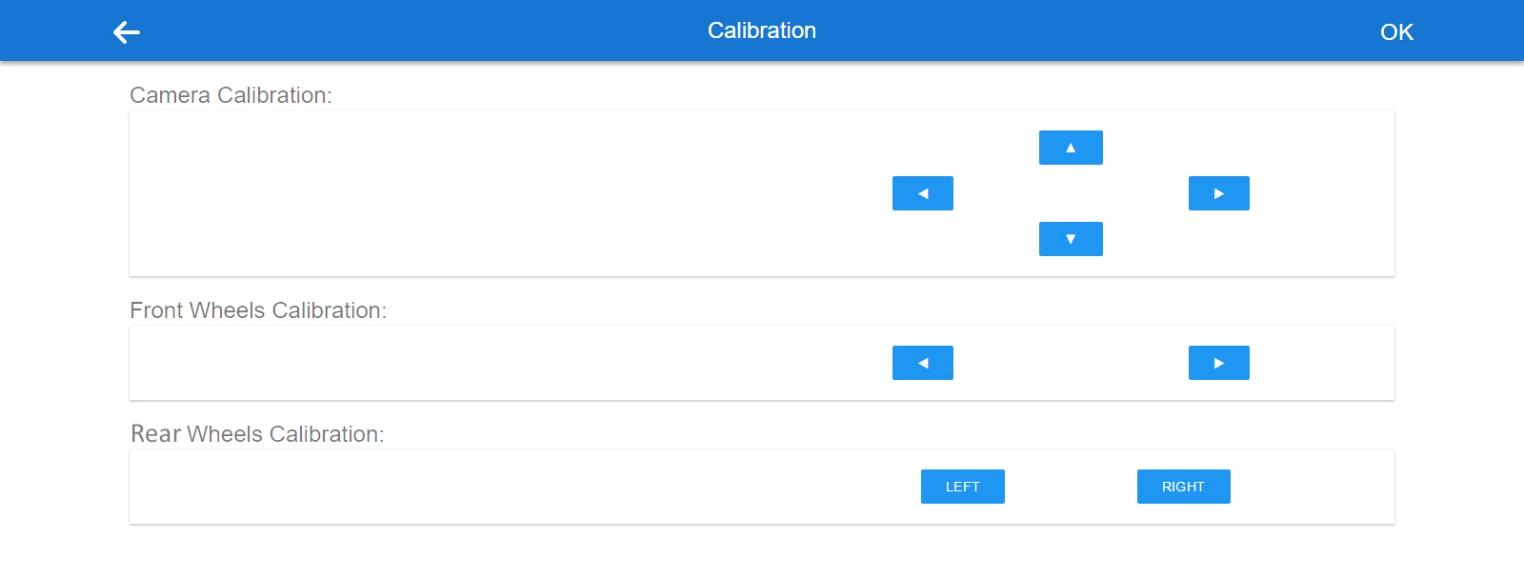
There are three calibration parts: Camera Calibration, Front Wheels Calibration and Rear Wheels Calibration.
When you enter this page, the car will go forward; if not, click Left and Right in Rear Wheels Calibration to adjust the angle of the wheel.
Note
Every time you press a button, the angle will be changed slightly. For your larger change per time, you need to long press the button.
Click OK to save the result after all the calibration is done.
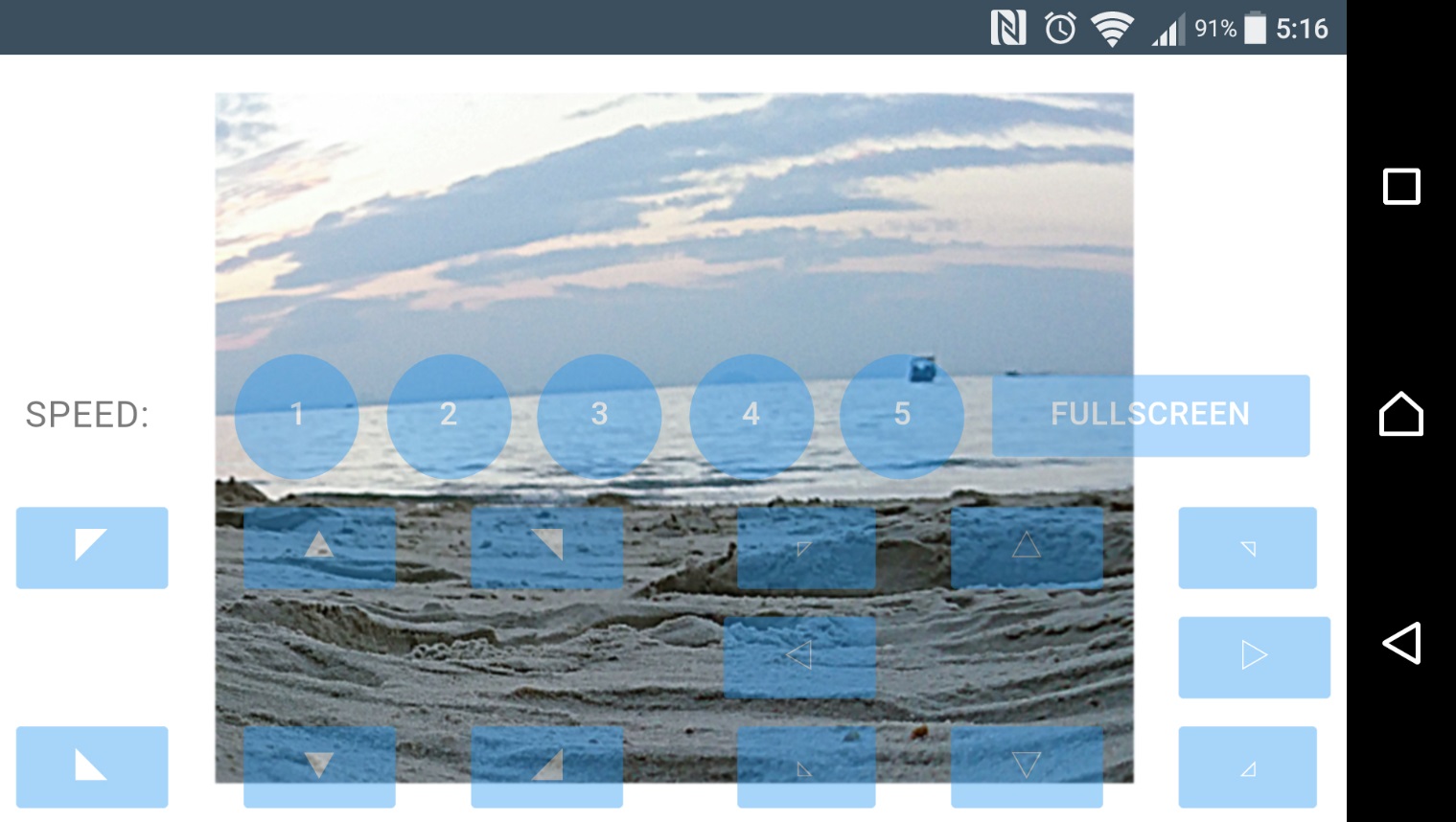
For Mobile Phones
Also for mobile phones, tap the FULLSCREEN button to have a better view and performance. Then, tap the buttons of 5 speed levels on the page to control the speed, and the arrow buttons to control the direction of the car and the pan-and-tilt. But you can only tab one touch point at one time.

Take this screenshot from an Android phone:
Though the appearance may not be as good as on the PC. Later updates may be released irregularly on Github. You are welcome to fork our repository and submit a Pull request with your changes. If there is no problem after testing, we are more than pleased to merge your request.