Nota
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauche tiefer in Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten ein.
Warum beitreten?
Expertenunterstützung: Löse Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalte frühzeitigen Zugang zu neuen Produktankündigungen und Vorschauen.
Spezielle Rabatte: Genieße exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nimm an Gewinnspielen und saisonalen Aktionen teil.
👉 Bereit, mit uns zu erkunden und zu kreieren? Klicke auf [Aquí] und tritt noch heute bei!
2.2.1 Fotowiderstand (MCP3008)
Nota
Abhängig von deiner Bausatzversion überprüfe bitte, ob du ADC0834 oder MCP3008 hast, und fahre mit dem entsprechenden Abschnitt fort.
Einführung
Der Fotowiderstand ist eine häufig verwendete Komponente zur Erkennung der Umgebungslichtintensität. Er hilft dem Controller, Tag und Nacht zu erkennen und Lichtsteuerungsfunktionen wie eine Nachtlampe zu realisieren. Dieses Projekt ist dem Potentiometer sehr ähnlich – du könntest sagen, es wandelt die Spannung in Lichtmessung um.
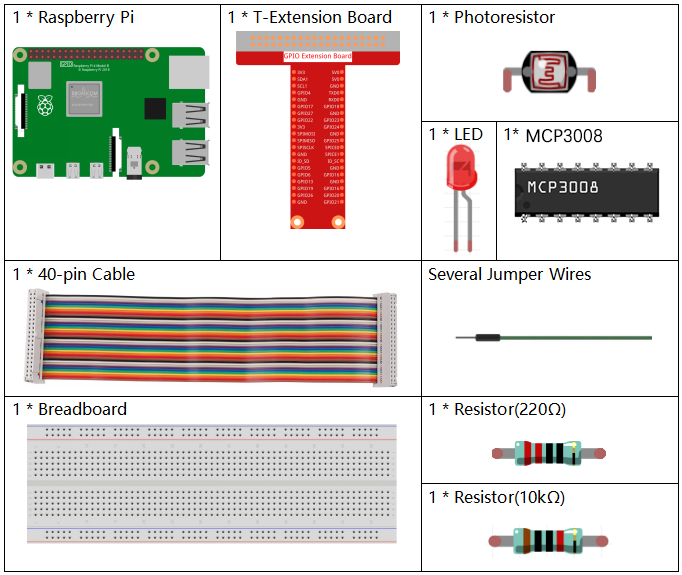
Benötigte Komponenten
In diesem Projekt benötigen wir die folgenden Komponenten.
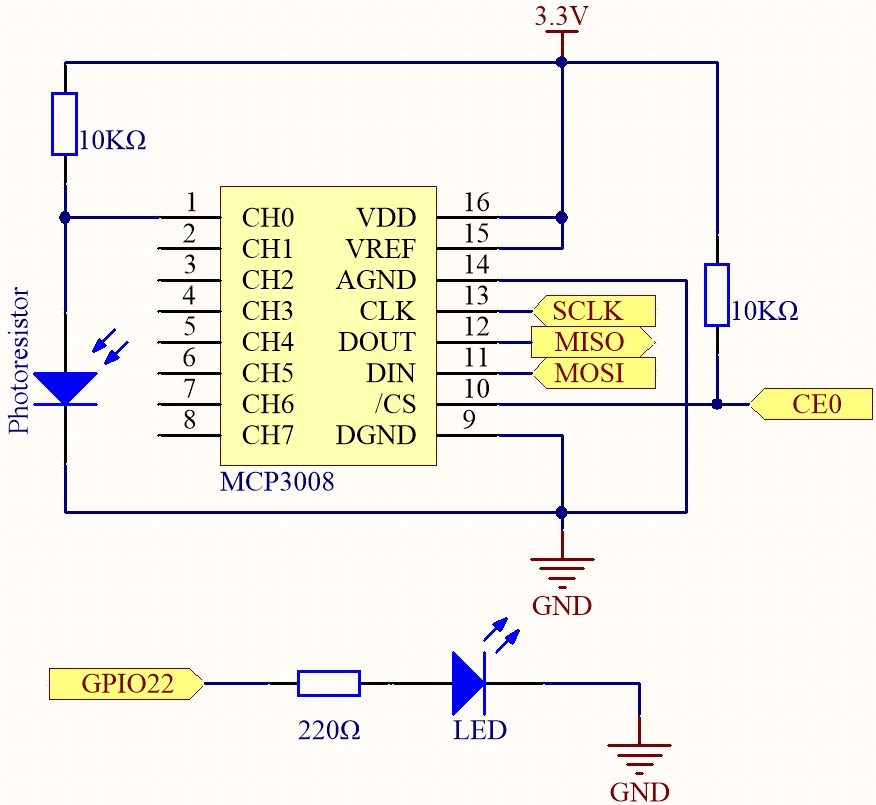
Schaltplan
T-Board Name |
Physisch |
WiringPi |
BCM |
|---|---|---|---|
SPICE0 |
pin24 |
10 |
8 |
SPIMOSI |
pin19 |
12 |
10 |
SPIMISO |
pin21 |
13 |
9 |
SPISCLK |
pin23 |
14 |
11 |
GPIO22 |
pin15 |
3 |
22 |
Experimentelle Schritte
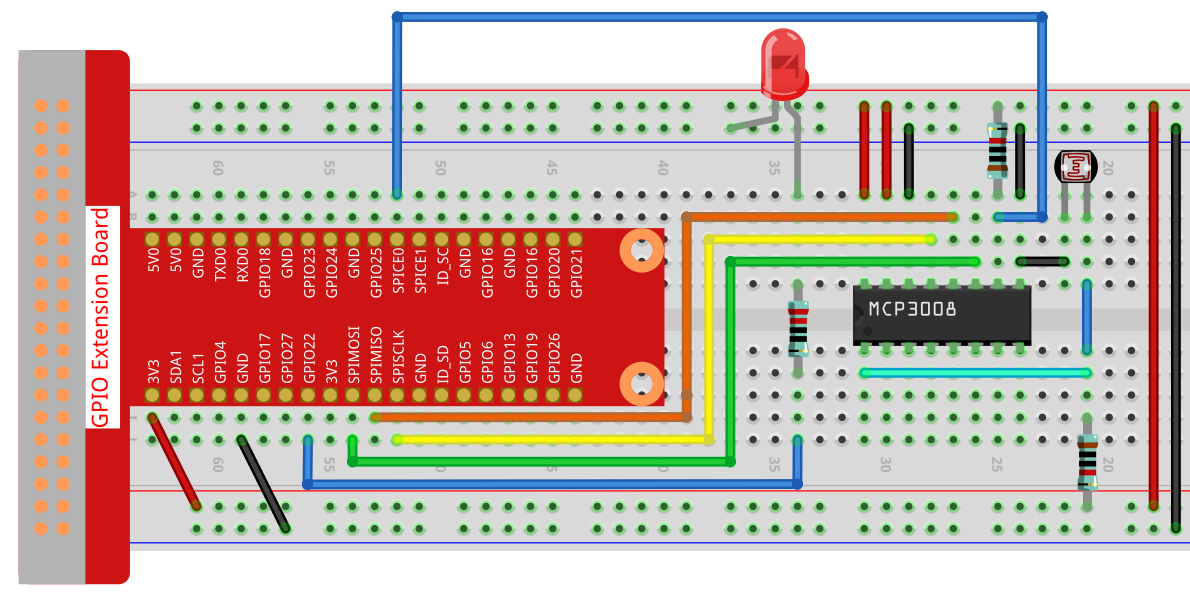
Schritt 1: Baue die Schaltung auf.
Schritt 2: Richte die SPI-Schnittstelle ein und installiere die Bibliothek spidev (siehe Configuración de SPI für detaillierte Anweisungen). Wenn du diese Schritte bereits abgeschlossen hast, kannst du diesen Schritt überspringen.
Schritt 3: Gehe in den Code-Ordner.
cd ~/davinci-kit-for-raspberry-pi/python-pi5
Schritt 4: Führe die ausführbare Datei aus.
sudo python3 2.2.1-2_Photoresistor_zero.py
Während der Code läuft, ändert sich die Helligkeit der LED entsprechend der vom Fotowiderstand erfassten Lichtintensität.
Advertencia
Falls die Fehlermeldung RuntimeError: Cannot determine SOC peripheral base address erscheint, siehe Si gpiozero no funciona.
Code
Nota
Du kannst den untenstehenden Code Ändern/Zurücksetzen/Kopieren/Ausführen/Stoppen.
Bevor du dies tust, musst du jedoch den Quellcode-Pfad wie davinci-kit-for-raspberry-pi/python-pi5 aufrufen.
Nachdem du den Code geändert hast, kannst du ihn direkt ausführen, um den Effekt zu sehen.
#!/usr/bin/env python3
import spidev
import time
from gpiozero import PWMLED
# Initialisiere eine PWM-LED an GPIO-Pin 22
led = PWMLED(22)
# Initialisiere SPI-Kommunikation (Bus 0, CE0 -> GPIO8)
spi = spidev.SpiDev()
spi.open(0, 0) # Bus 0, CS0
spi.max_speed_hz = 1000000 # 1 MHz
# Funktion zum Lesen von MCP3008-Kanal (0–7)
def read_adc(channel):
"""
Analogen Wert vom MCP3008 lesen (0–1023)
"""
if channel < 0 or channel > 7:
return -1
# MCP3008-Protokoll: Startbit, Single-Ended-Modus, Kanal (3 Bit), Füller
r = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((r[1] & 3) << 8) | r[2]
return value
# Funktion zum Umrechnen eines Wertes von einem Bereich in einen anderen
def MAP(x, in_min, in_max, out_min, out_max):
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
# Hauptschleife zum Lesen des ADC-Werts und Steuern der LED-Helligkeit
def loop():
while True:
# Analogen Wert von Kanal 0 des MCP3008 lesen
analogVal = read_adc(0)
print('value = %d' % analogVal)
# 0–1023 auf PWM-Bereich 0.0–1.0 umrechnen
led.value = analogVal / 1023.0
# 0,2 Sekunden warten
time.sleep(0.2)
# Hauptschleife ausführen und KeyboardInterrupt für sauberes Beenden behandeln
try:
loop()
except KeyboardInterrupt:
led.value = 0 # LED vor dem Beenden ausschalten
Code-Erklärung
Dieser Abschnitt importiert die Klasse
PWMLEDaus der Bibliothekgpiozerozur Steuerung von PWM-LEDs,spidevfür die SPI-Kommunikation mit dem MCP3008 undtimefür Pausen/Verzögerungen.#!/usr/bin/env python3 import spidev import time from gpiozero import PWMLED
Initialisiert eine PWM-LED, die mit GPIO-Pin 22 verbunden ist, und richtet die SPI-Schnittstelle für den MCP3008 ein (Bus 0, CE0). Die SPI-Taktfrequenz wird auf 1 MHz gesetzt.
# Initialisiere eine PWM-LED an GPIO-Pin 22 led = PWMLED(22) # Initialisiere SPI-Kommunikation (Bus 0, CE0 -> GPIO8) spi = spidev.SpiDev() spi.open(0, 0) # Bus 0, CS0 spi.max_speed_hz = 1000000 # 1 MHz
Definiert eine Funktion zum Lesen von einem bestimmten MCP3008-ADC-Kanal. Sie sendet einen 3-Byte-Befehl über SPI und extrahiert einen 10-Bit-Wert (0–1023) aus der Antwort.
# Funktion zum Lesen von MCP3008-Kanal (0–7) def read_adc(channel): """ Analogen Wert vom MCP3008 lesen (0–1023) """ if channel < 0 or channel > 7: return -1 # MCP3008-Protokoll: Startbit, Single-Ended-Modus, Kanal (3 Bit), Füller r = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((r[1] & 3) << 8) | r[2] return value
Definiert eine Hilfsfunktion
MAP(), die eine Zahl von einem Wertebereich in einen anderen umrechnet. Dies ist nützlich, um rohe ADC-Werte in einen geeigneten PWM-Bereich umzuwandeln.# Funktion zum Umrechnen eines Wertes von einem Bereich in einen anderen def MAP(x, in_min, in_max, out_min, out_max): return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
Implementiert eine Schleife, die wiederholt einen analogen Wert von Kanal 0 des MCP3008 liest, ihn auf einen PWM-Helligkeitswert (0.0–1.0) umrechnet und auf die LED anwendet. Die Schleife pausiert 0,2 Sekunden zwischen den Messungen.
# Hauptschleife zum Lesen des ADC-Werts und Steuern der LED-Helligkeit def loop(): while True: # Analogen Wert von Kanal 0 des MCP3008 lesen analogVal = read_adc(0) print('value = %d' % analogVal) # 0–1023 auf PWM-Bereich 0.0–1.0 umrechnen led.value = analogVal / 1023.0 # 0,2 Sekunden warten time.sleep(0.2)
Führt die Schleife aus und behandelt
KeyboardInterruptsauber. Wenn der Benutzer das Programm stoppt (Ctrl+C), wird die LED vor dem Beenden ausgeschaltet.# Hauptschleife ausführen und KeyboardInterrupt für sauberes Beenden behandeln try: loop() except KeyboardInterrupt: # LED vor dem Beenden ausschalten led.value = 0