3.7 Obstacle avoidance 2¶
In 3.5 Obstacle avoidance project, only 2 IR obstacle avoidance modules are used for obstacle avoidance, but the detection distance of IR obstacle avoidance module is short, which may make the car too late to avoid the obstacles.
In this project, we also add ultrasonic module to do some long-distance detection, so that the car can sense obstacles at a farther distance to make a judgment.
Required Components¶
In this project, we need the following components.
It’s definitely convenient to buy a whole kit, here’s the link:
Name |
ITEMS IN THIS KIT |
LINK |
|---|---|---|
3 in 1 Starter Kit |
380+ |
You can also buy them separately from the links below.
COMPONENT INTRODUCTION |
PURCHASE LINK |
|---|---|
- |
|
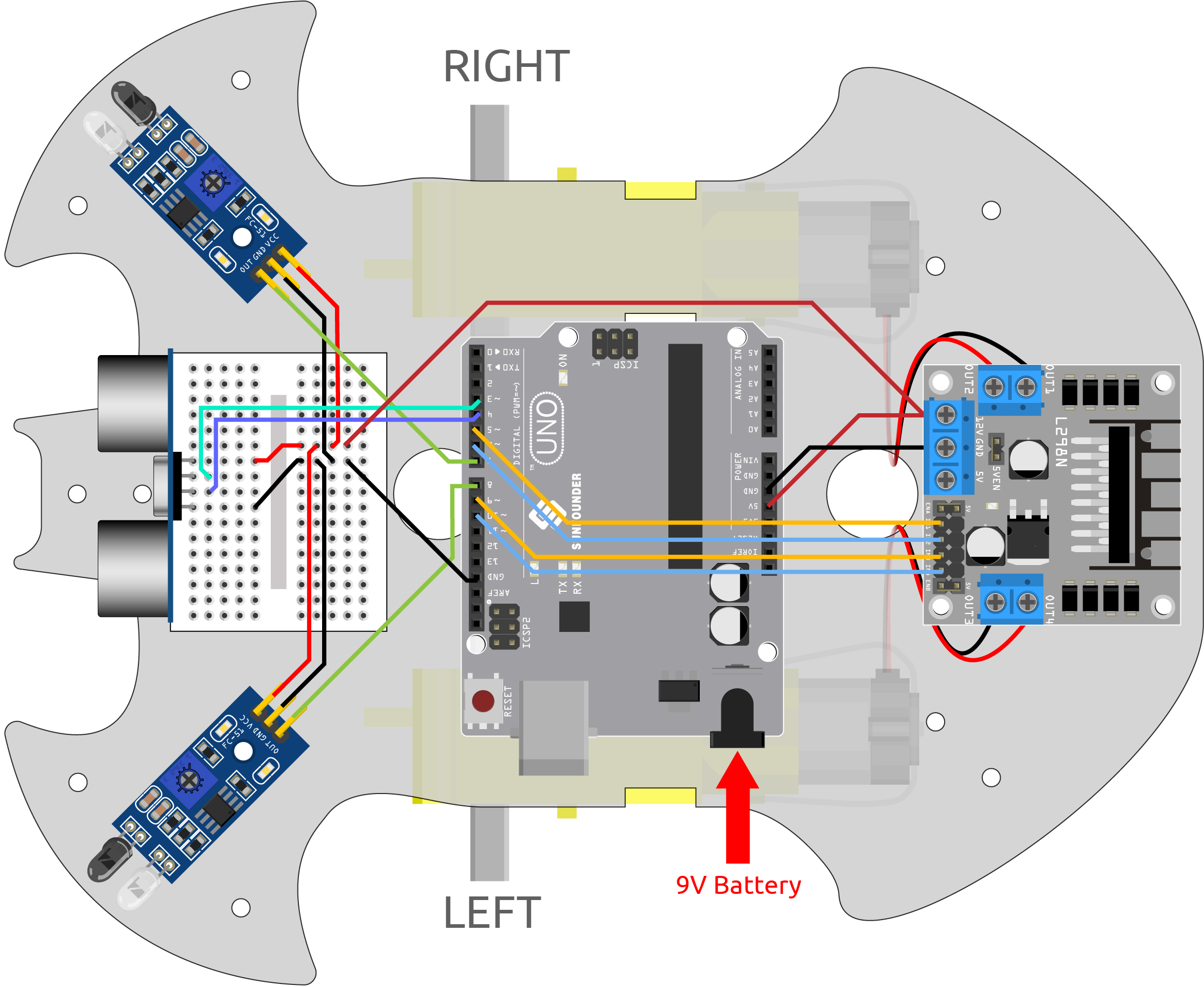
Build the Circuit¶
Connect the ultrasonic module and the 2 IR obstacle avoidance modules at the same time.
Wire the ultrasonic to the R3 board as follows.
Ultrasonic Module |
R3 Board |
Vcc |
5V |
Trig |
3 |
Echo |
4 |
Gnd |
GND |
The wiring of the 2 IR obstacle avoidance modules to the R3 board is as follows.
Left IR Module |
R3 Board |
OUT |
8 |
GND |
GND |
VCC |
5V |
Right IR Module |
R3 Board |
OUT |
7 |
GND |
GND |
VCC |
5V |
Programming¶
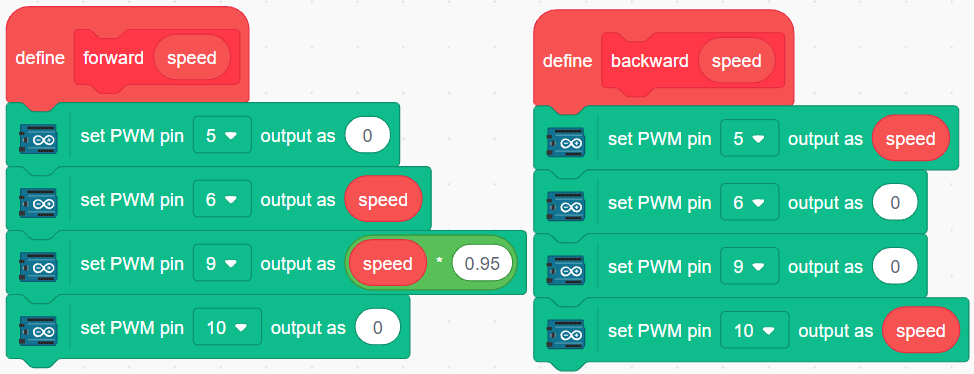
1. Create function
Make the car go forward and backward.
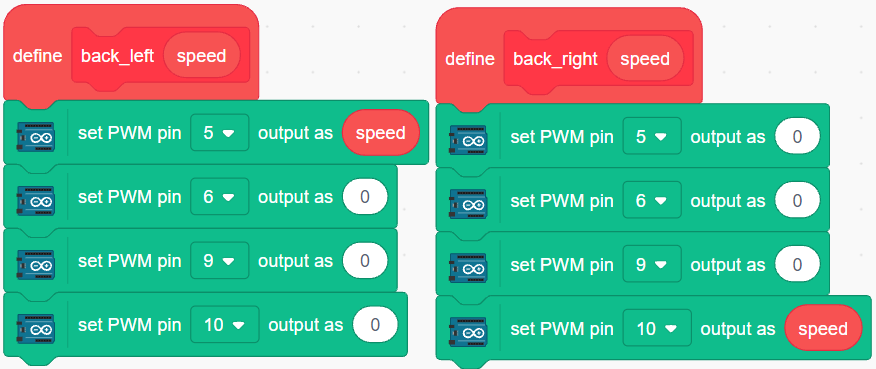
Make the car to go backward to the left and backward to the right.
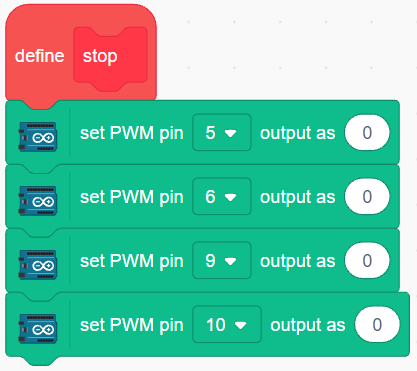
Make the car stop.
2. Emergency obstacle avoidance
The 2 infrared obstacle avoidance modules on the car are used for emergency obstacle avoidance, detecting obstacles at short distances, corners or relatively small obstacles.
If the left infrared module detects an obstacle, the car backs up to the left.
If the right IR module detects an obstacle, the car recedes to the right rear.
If 2 modules detect the obstacle at the same time, the car goes backward directly.

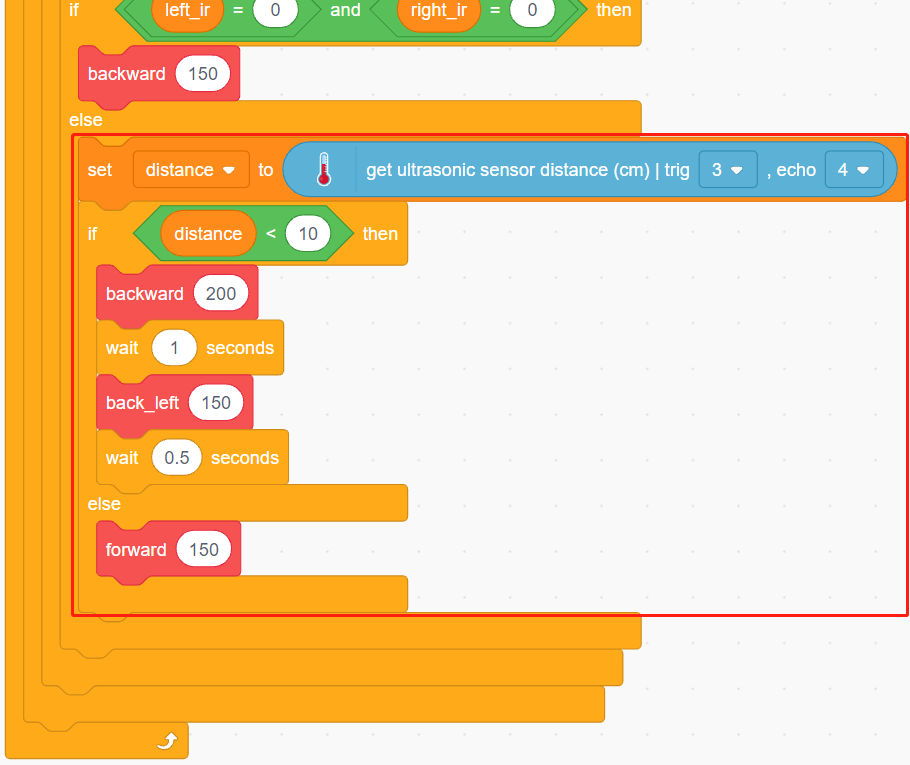
3. Long range obstacle avoidance
Read the value of ultrasonic module, when the detected value is less than 10, the car will go backward; otherwise it keeps going forward.