8. Self-Driving Car¶
This project is a combination of the two projects 6. Play with Ultrasonic Module and 5. Play with Obstacle Avoidance Module. 2 infrared obstacle avoidance modules do short distance or edge detection, and ultrasonic modules do long distance detection to confirm that the car does not hit an obstacle during the free driving process.
Required Components
In this project, we need the following components.
It’s definitely convenient to buy a whole kit, here’s the link:
Name |
ITEMS IN THIS KIT |
LINK |
|---|---|---|
3 in 1 Starter Kit |
380+ |
You can also buy them separately from the links below.
COMPONENT INTRODUCTION |
PURCHASE LINK |
|---|---|
- |
|
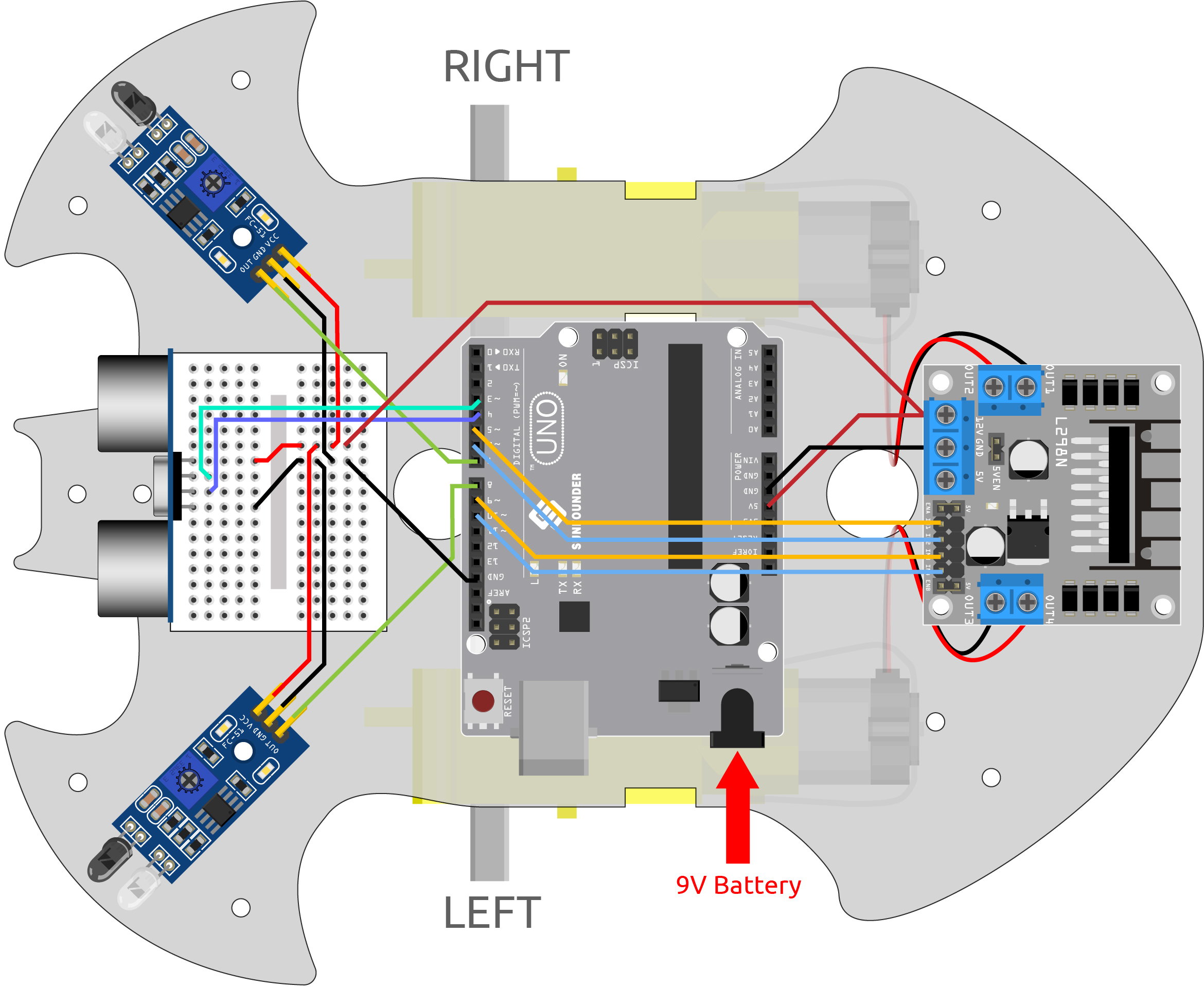
Wiring
Connect the ultrasonic module and the 2 IR obstacle avoidance modules at the same time.
Wire the ultrasonic to the R3 board as follows.
Ultrasonic Module |
R3 Board |
|---|---|
Vcc |
5V |
Trig |
3 |
Echo |
4 |
Gnd |
GND |
The wiring of the 2 IR obstacle avoidance modules to the R3 board is as follows.
Left IR Module |
R3 Board |
|---|---|
OUT |
8 |
GND |
GND |
VCC |
5V |
Right IR Module |
R3 Board |
|---|---|
OUT |
7 |
GND |
GND |
VCC |
5V |
Code
Note
Open the
8.self_driving_car.inofile under the path of3in1-kit\car_project\8.self_driving_car.Or copy this code into Arduino IDE.
Or upload the code through the Arduino Web Editor.
The car will drive freely once the code has been uploaded successfully. When the IR obstruction module on both sides detects an obstacle, it will move in the opposite direction for emergency evasion; if there is an obstacle within 2~10cm directly in front of the car, it will back up to the left, adjust its direction, and then move forward.
How it works?
The workflow of this project is as follows.
Priority read the value of left and right IR obstacle avoidance module.
If the left IR module is 0 (obstacle detected), the right IR module is 1, let the car back up to the left.
If the right IR module is 0 (obstacle detected), let the car back up to the right.
If 2 IR modules detect the obstacle at the same time, the car will back up.
Otherwise read the distance detected by the ultrasonic module.
If the distance is greater than 50cm, let the car go forward.
If the distance is between 2-10cm, let the car backward before turning.
If the distance is between 10-50cm, let the car go forward at low speed.
void loop() {
int left = digitalRead(leftIR); // 0: Obstructed 1: Empty
int right = digitalRead(rightIR);
if (!left && right) {
backLeft(150);
} else if (left && !right) {
backRight(150);
} else if (!left && !right) {
moveBackward(150);
} else {
float distance = readSensorData();
Serial.println(distance);
if (distance > 50) { // Safe
moveForward(200);
} else if (distance < 10 && distance > 2) { // Attention
moveBackward(200);
delay(1000);
backLeft(150);
delay(500);
} else {
moveForward(150);
}
}
}