5.8 User-defined Function¶
In c, we can divide a large program into the basic building blocks known as function. The function contains the set of programming statements enclosed by {}. A function can be called multiple times to provide reusability and modularity to the C program. In other words, we can say that the collection of functions creates a program. The function is also known as procedureor subroutinein other programming languages.
There are the following advantages of functions.
By using functions, we can avoid rewriting same logic/code again and again in a program.
We can call C functions any number of times in a program and from any place in a program.
We can track a large C program easily when it is divided into multiple functions.
Reusability is the main achievement of C functions.
However, Function calling is always a overhead in a C program.
There are two types of functions in C programming:
Library Functions: the functions which are declared in the C header files.
User-defined functions: the functions which are created by the C programmer, so that he/she can use it many times. It reduces the complexity of a big program and optimizes the code.
In this project, define a function to read the value of the ultrasonic module.
Required Components
In this project, we need the following components.
It’s definitely convenient to buy a whole kit, here’s the link:
Name |
ITEMS IN THIS KIT |
LINK |
|---|---|---|
3 in 1 Starter Kit |
380+ |
You can also buy them separately from the links below.
COMPONENT INTRODUCTION |
PURCHASE LINK |
|---|---|
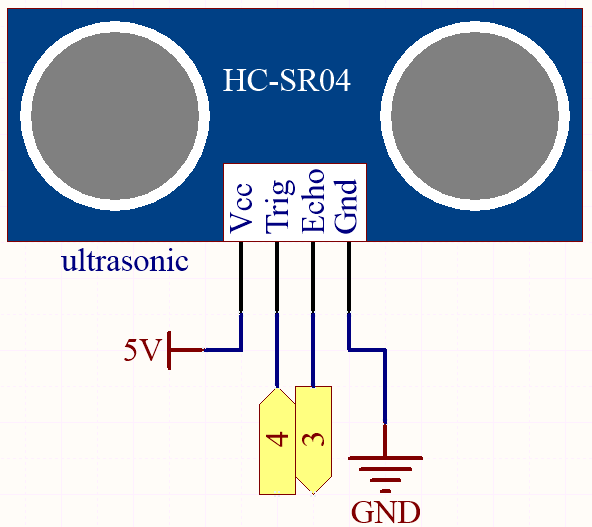
Schematic
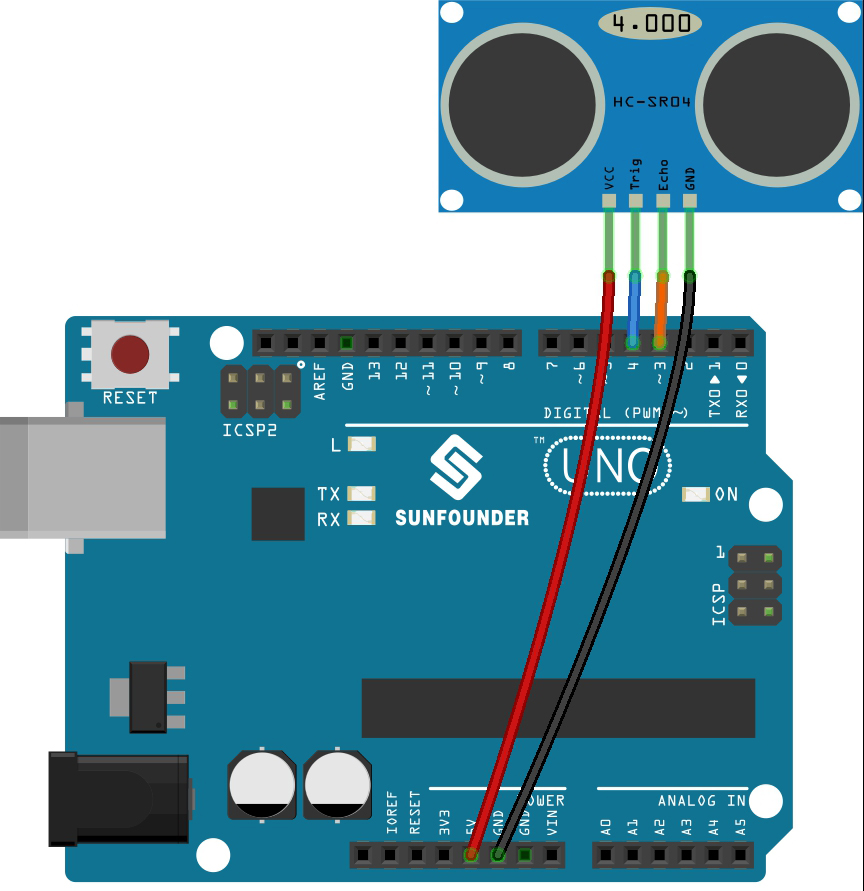
Wiring
Code
Note
Open the
5.8.user_function.inofile under the path of3in1-kit\basic_project\5.8.user_function.Or copy this code into Arduino IDE.
Or upload the code through the Arduino Web Editor.
After the code is successfully uploaded, the serial monitor will print out the distance between the ultrasonic sensor and the obstacle ahead.
How it works?
About the application of ultrasonic sensor, we can directly check the subfunction.
float readSensorData(){// ...}
The trigPin of the ultrasonic module transmits a 10us square wave signal every 2us
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
The echoPin receives a high level signal if there is an obstacle within the range and use the pulseIn() function to record the time from sending to receiving.
microsecond=pulseIn(echoPin, HIGH);
The speed of sound is 340 m/s or 29 microseconds per centimeter.
This gives the distance travelled by the square wave, outbound and return, so we divide by 2 to get the distance of the obstacle.
float distance = microsecond / 29.00 / 2;
Note that the ultrasonic sensor will pause the program when it is working, which may cause some lagging when writing complex projects.